Презентация «Управление и кибернетика»
презентация к уроку по информатике и икт (9 класс) на тему
В 1948 году в США и Европе вышла книга Винера » Кибернетика или Управление и связь в животном и машине «, ознаменовавшая своим появлением рождение нового научного направления — кибернетики . Кибернетика – это наука об управлении и связях в живых организмах и технических устройствах. Норберт Винер (26.11.1894 — 1964)
Вопросы Что такое управление? Что представляет собой управляющее воздействие с точки зрения кибернетики? Что такое алгоритм управления?
человек и телевизор хозяин и собака светофор и автомобиль Приведите примеры управляющего воздействия
Команды передаются через пульт управления «включить/выключить» «переключить каналы» «увеличить/уменьшить громкость» Для систем управления назовите команды управления и скажите, в какой форме они передаются
Для систем управления назовите команды управления и скажите, в какой форме они передаются
Хозяин передает собаке команды голосом:
Световые сигналы светофора красный — «стоять» зеленый — «ехать» желтый -«приготовиться» Для систем управления назовите команды управления и скажите, в какой форме они передаются
Прямая связь процесс передачи команд управления от управляющего объекта к управляемому человек и телевизор хозяин и собака светофор и автомобиль
Вопросы Что такое обратная связь в процессе управления? Какую структуру имеет управляющий алгоритм при наличии обратной связи?
Прежде чем отдать очередную команду человек смотрит на состояние объекта управления, на результат выполнения предыдущей команды. Если человек не нашел нужную передачу на данном канале, то он переключат телевизор на следующий канал Приведите примеры систем с обратной связью
Линейная последовательность команд –линейный алгоритм Управляющее воздействие Управляющий объект Управляемый объект Управляющее воздействие Управляющий объект Управляемый объект Обратная связь Алгоритм, допускающий ветвления и повторения
Алгоритм называется ветвящимся, если в нем по определенному условию происходит выбор одного из двух действий Алгоритм называется циклическим, если в нем содержится указание на повторение одних и тех же действий по некоторому условию
Что такое система с программным управлением? Системы, в которых роль управляющего объекта поручается компьютеру, называются автоматическими системами с программным управлением .
автопилот в самолете ускоритель элементарных частиц Приведите примеры систем с программным управлением
автоматические линии на заводе атомный реактор на электростанции Приведите примеры систем с программным управлением
Домашнее задание § 1 пересказ
5.2. Обратная связь
Для управления нужна информация.
Во-первых, управляющий объект должен получить информацию о том, что ему нужно, т. е. он должен знать цель своих действий.
Во-вторых, управляющий объект должен знать, как можно достичь поставленной цели. Важно, что информация о цели и способах её достижения должна быть известна управляющему объекту до начала процесса управления.
Пример 1. Рассмотрим управление движением автомашин (объект управления) на перекрёстке с помощью светофора (управляющий объект). В этой ситуации управляющее воздействие формируется в зависимости от заложенной в управляющем объекте исходной информации. Светофор не воспринимает текущую информацию о состоянии движения на перекрёстке, он не изменяет алгоритм управления от того, что с какой-то стороны скопилось очень много машин и образовалась «пробка».

Обратная связь — это процесс передачи информации о состоянии объекта управления в управляющий объект.
Обратная связь позволяет корректировать управляющие воздействия управляющего объекта на объект управления в зависимости от состояния объекта управления (рис. 2.7). Обратная связь предусмотрена в ряде бытовых приборов (например, утюг с терморегулятором, холодильник, кастрюля-скороварка), в живых организмах, в обществе.

Рис. 2.7. Кибернетическая модель управления
В настоящее время очень часто роль управляющего объекта отводится компьютеру, в память которого заложена программа управления, предусматривающая все варианты информации, которые могут быть получены по обратной связи.
Пример 2. Если вместо обычного светофора на дорожном перекрёстке будет установлен «интеллектуальный» светофор — высокотехнологичное устройство, оснащённое датчиками, фиксирующими скорость движения на дороге и плотность транспортных потоков, то управление движением станет более рациональным за счёт учёта информации, поступающей от объекта управления.
2.5.2. Обратная связь
Для управления нужна информация.
Во-первых, управляющий объект должен получить информацию о том, что ему нужно, т. е. он должен знать цель своих действий.
Во-вторых, управляющий объект должен знать, как можно достичь поставленной цели. Важно, что информация о цели и способах её достижения должна быть известна управляющему объекту до начала процесса управления.
Пример 1. Рассмотрим управление движением автомашин (объект управления) на перекрёстке с помощью светофора (управляющий объект). В этой ситуации управляющее воздействие формируется в зависимости от заложенной в управляющем объекте исходной информации. Светофор не воспринимает текущую информацию о состоянии движения на перекрёстке, он не изменяет алгоритм управления от того, что с какой-то стороны скопилось очень много машин и образовалась «пробка».

Обратная связь — это процесс передачи информации о состоянии объекта управления в управляющий объект.
Обратная связь позволяет корректировать управляющие воздействия управляющего объекта на объект управления в зависимости от состояния объекта управления (рис. 2.7). Обратная связь предусмотрена в ряде бытовых приборов (например, утюг с терморегулятором, холодильник, кастрюля-скороварка), в живых организмах, в обществе.

Рис. 2.7. Кибернетическая модель управления
В настоящее время очень часто роль управляющего объекта отводится компьютеру, в память которого заложена программа управления, предусматривающая все варианты информации, которые могут быть получены по обратной связи.
Пример 2. Если вместо обычного светофора на дорожном перекрёстке будет установлен «интеллектуальный» светофор — высокотехнологичное устройство, оснащённое датчиками, фиксирующими скорость движения на дороге и плотность транспортных потоков, то управление движением станет более рациональным за счёт учёта информации, поступающей от объекта управления.
Аннотация к презентации
Смотреть презентацию онлайн с анимацией на тему «Управление с обратной связью» по информатике. Презентация состоит из 10 слайдов. Для учеников 9 класса. Материал добавлен в 2021 году.. Возможность скчачать презентацию powerpoint бесплатно и без регистрации. Размер файла 0.63 Мб.

Подготовил: учитель информатики МБОУ «СОШ №5» Широкорадюк О.П. г. Симферополь Тема урока: Управление с обратной связью

Слайд 2
КРАСНЫЙ – ЗЕЛЕНЫЙ – ЖЕЛТЫЙ – КРАСНЫЙ – ЗЕЛЕНЫЙ – ЖЕЛТЫЙ – КРАСНЫЙ и т.д. Алгоритм работы светофора ПРЯМАЯ СВЯЗЬ – управляющий только отдает команды ОБРАТНАЯ СВЯЗЬ – это процесс передачи информации о состоянии объекта управления управляющему объекту

Слайд 3
МОДЕЛЬ УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ
УПРАВЛЯЮЩЕЕ ВОЗДЕЙСТВИЕ ОБРАТНАЯ СВЯЗЬ ТАКОЙ АЛГОРИТМ НАЗЫВАЕТСЯ ЦИКЛИЧЕСКИМ ВКЛЮЧИТЬ ТЕЛЕВИЗОР НА 1-М КАНАЛЕ ПОКА НЕ БУДЕТ НАЙДЕНА ИСКОМАЯ ПЕРЕДАЧА, ПОВТОРЯТЬ: ПЕРЕКЛЮЧИТЬ ТЕЛЕВИЗОР НА СЛЕДУЮЩИЙ КАНАЛ УПРАВЛЯЮЩИЙ ОБЪЕКТ УПРАВЛЯЕМЫЙ ОБЪЕКТ ЕСЛИ НА ДОРОГЕ – 1 СКОПИЛОСЬ БОЛЬШЕ МАШИН ТО ОТКРЫТЬ ДВИЖЕНИЕ ПО ДОРОГЕ – 1 ИНАЧЕ ОТКРЫТЬ ДВИЖЕНИЕ ПО ДОРОГЕ – 2 ТАКОЙ АЛГОРИТМ НАЗЫВАЕТСЯ ВЕТВЯЩИМСЯ

Слайд 4
СИСТЕМЫ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ
СИСТЕМЫ, В КОТОРЫХ РОЛЬ УПРАВЛЯЮЩЕГО ОБЪЕКТА ПОРУЧАЕТСЯ КОМЬЮТЕРУ, НАЗЫВАЮТСЯ АВТОМАТИЧЕСКИМИ СИСТЕМАМИ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ ДЛЯ ФУНКЦИОНИРОВАНИЯ ТАКОЙ СИСТЕМЫ: между компьютером и объектом управления должна быть обеспечена прямая и обратная связь; в память компьютера должна быть заложена программа управления; Такой способ управления называется ПРОГРАММНЫМ УПРАВЛЕНИЕМ

Слайд 5
Циклический алгоритм
пока впереди не край повторятьнц шагкц Формат команды цикла следующий: пока повторятьнцкц

Слайд 6
программа Рамка нач поворот поворот поворот делай ЛИНИЯ поворот делай ЛИНИЯ поворот делай ЛИНИЯ поворот делай ЛИНИЯ кон процедура ЛИНИЯ нач пока впереди не стена повторять нц шаг кц кон

Слайд 7
БЛОК-СХЕМЫ АЛГОРИТМА
Конец или начало алгоритма Простая команда Обращение к вспомогательному алгоритму Проверка условия Конец или начало алгоритма Простая команда Обращение к вспомогательному алгоритму Конец или начало алгоритма Простая команда Проверка условия Обращение к вспомогательному алгоритму Конец или начало алгоритма Простая команда Проверка условия Обращение к вспомогательному алгоритму Конец или начало алгоритма Простая команда

Слайд 8
БЛОК – СХЕМА СТРУКТУРЫ «ЦИКЛ»
впереди не стена ШАГ ДА НЕТ БЛОК – СХЕМА АЛГОРИТМА «Рамка» УСЛОВИЕ ТЕЛО ЦИКЛА ДА НЕТ нач.ЛИНИЯ впереди не стена ШАГ ДА НЕТ кон.ЛИНИЯ

Слайд 9
ТРЕБУЕТСЯ НАЧЕРТИТЬ ПОЛЕ ГОРИЗОНТАЛЬНЫМИ ЛИНИЯМИ. ИСХОДНОЕ СОСТОЯНИЕ ИСПОЛНИТЕЛЯ: ВЕРХНИЙ ЛЕВЫЙ УГОЛ, НАПРАВЛЕНИЕ – НА ЮГ.

Слайд 10
СРОЧНО.
1)Что такое обратная связь в процессе управления? 2)Какую структуру имеет управля??щий алгоритм в системе без обратной связи? 3)Какую структуру может иметь управляющий алгоритм при наличии обратной связи? 4)Что такое система с программным управлением? 5)Проанализируйте систему «учитель-класс» как систему управления. Кто здесь управляющий объект, кто — объект управления? Какие действуют механизмы прямой и обратной связи? 6)Придумайте ситуации на уроке, когда учитель использует ветвление или цикл, принимая управляющие решения. 7)Назовите систему, в которой учитель является объектом управления. Проанализируйте ее. 8)Опишите систему обучения, в которой роль учителя выполняет компьютер. Какие механизмы прямой и обратной связи действуют в такой системе? В чем преимущества и в чем недостатки компьютерного обучения по сравнению с традиционным?

1)Это процесс передачи информации о состоянии объекта управления управляющему объекту.
2)Управляющий алгоритм в системе без обратной связи имеет линейную (последовательную) структуру.
3)При наличии обратной связи алгоритм может быть более гибким, допускающим проверку условий, ветвления и циклы
4)Системы, в которых роль управляющего объекта поручается компьютеру, называются автоматическими системами с программным управлением.
5)Управляющий объект — учитель, а ученики являются объектом управления. Прямой канал передачи информации — передача знаний учителем, а обратная связь — ответы учеников, результаты контрольных работ, сочинения и т. п. Учителю обратная связь дает информацию о достижении поставленных им целей — когда ученики выполнили домашнее задание.
6)Цикл: учитель выставляет оценки в журнал; ветвление: Если Иванов балуется, то учитель его выгоняет, если нет(иначе) оставляет в классе.
7)Модель управления с обратной связью
8)Информативная доска с голосовой подачей информации. используется видео микрофон с распознованием ученика.(можно сделать для каждого ученика отдельную клавиатуру с которой он будет вводить вопрос,тем самым повышая мобильность системы)
СРОЧНО.
1)Что такое обратная связь в процессе управления? 2)Какую структуру имеет управля??щий алгоритм в системе без обратной связи? 3)Какую структуру может иметь управляющий алгоритм при наличии обратной связи? 4)Что такое система с программным управлением? 5)Проанализируйте систему «учитель-класс» как систему управления. Кто здесь управляющий объект, кто — объект управления? Какие действуют механизмы прямой и обратной связи? 6)Придумайте ситуации на уроке, когда учитель использует ветвление или цикл, принимая управляющие решения. 7)Назовите систему, в которой учитель является объектом управления. Проанализируйте ее. 8)Опишите систему обучения, в которой роль учителя выполняет компьютер. Какие механизмы прямой и обратной связи действуют в такой системе? В чем преимущества и в чем недостатки компьютерного обучения по сравнению с традиционным?
1)Это процесс передачи информации о состоянии объекта управления управляющему объекту.
2)Управляющий алгоритм в системе без обратной связи имеет линейную (последовательную) структуру.
3)При наличии обратной связи алгоритм может быть более гибким, допускающим проверку условий, ветвления и циклы
4)Системы, в которых роль управляющего объекта поручается компьютеру, называются автоматическими системами с программным управлением.
5)Управляющий объект — учитель, а ученики являются объектом управления. Прямой канал передачи информации — передача знаний учителем, а обратная связь — ответы учеников, результаты контрольных работ, сочинения и т. п. Учителю обратная связь дает информацию о достижении поставленных им целей — когда ученики выполнили домашнее задание.
6)Цикл: учитель выставляет оценки в журнал; ветвление: Если Иванов балуется, то учитель его выгоняет, если нет(иначе) оставляет в классе.
7)Модель управления с обратной связью
8)Информативная доска с голосовой подачей информации. используется видео микрофон с распознованием ученика.(можно сделать для каждого ученика отдельную клавиатуру с которой он будет вводить вопрос,тем самым повышая мобильность системы)
Компьютерный практикум
УПРАВЛЕНИЕ И КИБЕРНЕТИКА

1. Зарождение и предмет кибернетики
2. Итоговый тест к главе 5 «Управление и алгоритмы»
3. Компьютер и управление
4. Кроссворд по теме: «Управление и алгоритмы»
5. Логическая схема понятий по теме: «Управление и алгоритмы»
6. Тренировочный тест к главе 5 «Управление и алгоритмы»
4. Классификация систем автоматического управления
1.4.1. Классификация по виду математического описания
По виду математического описания (уравнений динамики и статики) системы автоматического управления (САУ) подразделяются на линейные и нелинейные системы (САУ или САР).
Каждый “подкласс” (линейных и нелинейных) подразделяется на еще ряд “подклассов”. Например, линейные САУ (САР) имеют различия по виду математического описания.
Поскольку в этом семестре будут рассматриваться динамические свойства только линейных систем автоматического управления (регулирования), то ниже приведем классификацию по виду математического описания для линейных САУ (САР):
1) Линейные системы автоматического управления, описываемые в переменных «вход-выход» обыкновенными дифференциальными уравнениями (ОДУ) с постоянными коэффициентами:
где x(t) – входное воздействие; y(t) – выходное воздействие (регулируемая величина).
Если использовать операторную («компактную») форму записи линейного ОДУ, то уравнение (1.4.1) можно представить в следующем виде:
где, p = d/dt — оператор дифференцирования; L(p), N(p) — соответствующие линейные дифференциальные операторы, которые равны:
2) Линейные системы автоматического управления, описываемые линейными обыкновенными дифференциальными уравнениями (ОДУ) с переменными (во времени) коэффициентами:
В общем случае такие системы можно отнести и к классу нелинейных САУ (САР).
3) Линейные системы автоматического управления, описываемые линейными разностными уравнениями:
где f(…) – линейная функция аргументов; k = 1, 2, 3… — целые числа; Δt – интервал квантования (интервал дискретизации).
Уравнение (1.4.4) можно представить в «компактной» форме записи:
Обычно такое описание линейных САУ (САР) используется в цифровых системах управления (с использованием ЭВМ).
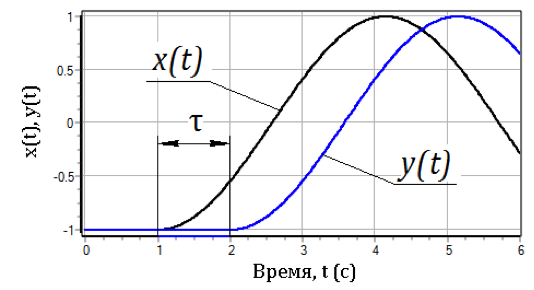
4) Линейные системы автоматического управления с запаздыванием:
где L(p), N(p) — линейные дифференциальные операторы; τ — время запаздывания или постоянная запаздывания.
Если операторы L(p) и N(p) вырождаются (L(p) = 1; N(p) = 1), то уравнение (1.4.6) соответствует математическому описанию динамики звена идеального запаздывания:
а графическая иллюстрация его свойств привдена на рис. 1.4.1
5) Линейные системы автоматического управления, описываемые линейными дифференциальными уравнения в частных производных. Нередко такие САУ называют распределенными системами управления. ==> «Абстрактный» пример такого описания:
Система уравнений (1.4.7) описывает динамику линейно распределенной САУ, т.е. регулируемая величина зависит не только от времени, но и от одной пространственной координаты.
Если система управления представляет собой «пространственный» объект, то ==>
где зависит от времени и пространственных координат, определяемых радиусом-вектором
6) САУ, описываемые системами ОДУ, или системами разностных уравнений, или системами уравнений в частных производных ==> и так далее…
Аналогичную классификацию можно предложить и для нелинейных САУ (САР)…
Для линейных систем выполеняются следующие требования:
- линейность статической характеристики САУ;
- линейность уравнения динамики, т.е. переменные в уравнение динамики входят только в линейной комбинации.
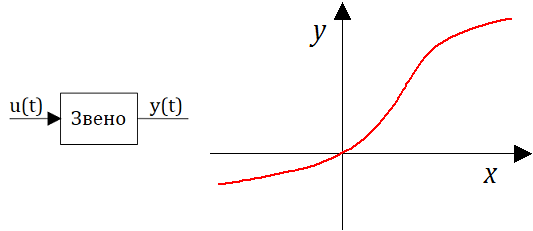
Статической характеристикой называется зависимость выхода от величины входного воздействия в установившемся режиме (когда все переходные процессы затухли).
Для систем, описываемых линейными обыкновенными дифференциальными уравнениями с постоянными коэффициентами статическая характеристика получается из уравнения динамики (1.4.1) приравниванием нулю всех нестационарных членов ==>
На рис.1.4.2 представлены примеры линейной и нелинейных статических характеристик систем автоматического управления (регулирования).

Нелинейность членов, содержащих производные по времени в уравнениях динамики, может возникнуть при использовании нелинейных математических операций (*, /, , , sin, ln и т.д.). Например, рассматривая уравнение динамики некоторой «абстрактной» САУ
отметим, что в этом уравнении при линейной статической характеристики второе и третье слагаемые (динамические члены) в левой части уравнения — нелинейные, поэтому САУ, описываемая подобным уравнением, является нелинейной в динамическом плане.
1.4.2. Классификация по характеру передаваемых сигналов
По характеру передаваемых сигналов системы автоматического управления (или регулирования) подразделяются:
- непрерывные системы (системы непрерывного действия);
- релейные системы (системы релейного действия);
- системы дискретного действия (импульсные и цифровые).
Системой непрерывного действия называется такая САУ, в каждом из звеньев которой непрерывному изменению входного сигнала во времени соответствует непрерывное изменение выходного сигнала, при этом закон изменения выходного сигнала может быть произвольным. Чтобы САУ была непрерывной, необходимо, чтобы статические характеристики всех звеньев были непрерывными.
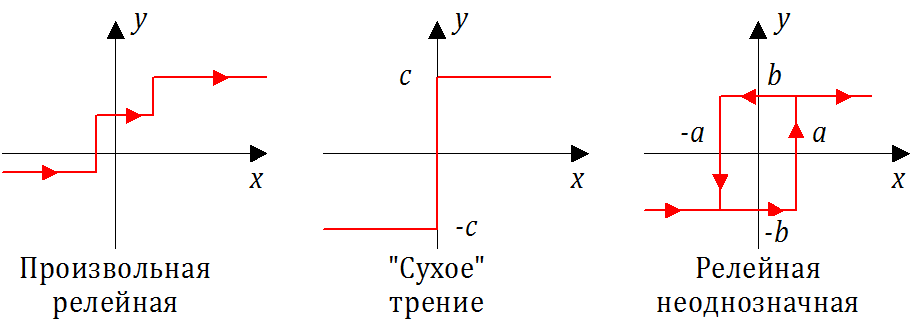
Системой релейного действия называется САУ, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина в некоторые моменты процесса управления меняется “скачком” в зависимости от величины входного сигнала. Статическая характеристика такого звена имеет точки разрыва или излома с разрывом.
Системой дискретного действия называется система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина имеет вид отдельных импульсов, появляющиеся через некоторый промежуток времени.
Звено, преобразующее непрерывный сигнал в дискретный сигнал, называется импульсным. Подобный вид передаваемых сигналов имеет место в САУ с ЭВМ или контроллером.
Наиболее часто реализуются следующие методы (алгоритмы) преобразования непрерывного входного сигнала в импульсный выходной сигнал:
- амплитудно-импульсная модуляция (АИМ);
- широтно-импульсная модуляция (ШИМ).
На рис. 1.4.5 представлена графическая иллюстрация алгоритма амплитудно-импульсной модуляции (АИМ). В верхней части рис. представлена временная зависимость x(t) — сигнала на входе в импульсное звено. Выходной сигнал импульсного блока (звена) y(t) – последовательность прямоугольных импульсов, появляющихся с постоянным периодом квантования Δt (см. нижнюю часть рис.). Длительность импульсов – одинакова и равна Δ. Амплитуда импульса на выходе блока пропорциональна соответствующей величине непрерывного сигнала x(t) на входе данного блока.
Данный метод импульсной модуляции был весьма распространен в электронно-измерительной аппаратуре систем управления и защиты (СУЗ) ядерных энергетических установок (ЯЭУ) в 70-х…80-х годах прошлого столетия.
На рис. 1.4.6 представлена графическая иллюстрация алгоритма широтно-импульсной модуляции (ШИМ). В верхней части рис. 1.14 представлена временная зависимость x(t) – сигнала на входе в импульсное звено. Выходной сигнал импульсного блока (звена) y(t) – последовательность прямоугольных импульсов, появляющихся с постоянным периодом квантования Δt (см. нижнюю часть рис. 1.14). Амплитуда всех импульсов – одинакова. Длительность импульса Δt на выходе блока пропорциональна соответствующей величине непрерывного сигнала x(t) на входе импульсного блока.
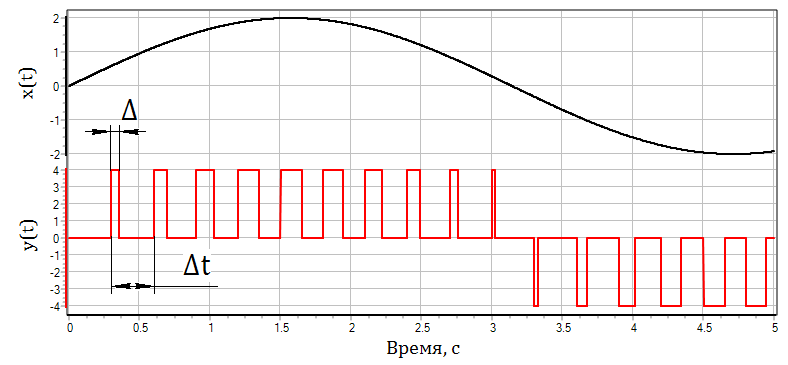
Данный метод импульсной модуляции в настоящее время является наиболее распространенным в электронно-измерительной аппаратуре систем управления и защиты (СУЗ) ядерных энергетических установок (ЯЭУ) и САУ других технических систем.
Завершая данный подраздел, необходимо заметить, что если характерные постоянные времени в других звеньях САУ (САР) существенно больше Δt (на порядки), то импульсная система может считаться непрерывной системой автоматического управления (при использовании как АИМ, так и ШИМ).
1.4.3. Классификация по характеру управления
По характеру процессов управления системы автоматического управления подразделяются на следующие типы:
- детерминированные САУ, в которых входному сигналу однозначно может быть поставлен в соответствие выходной сигнал (и наоборот);
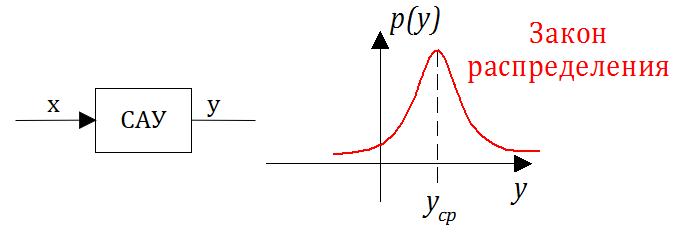
- стохастические САУ (статистические, вероятностные), в которых на данный входной сигнал САУ “отвечает” случайным (стохастическим) выходным сигналом.
Выходной стохастический сигнал характеризуется:
- законом распределения;
- математическим ожиданием (средним значением);
- дисперсией (среднеквадратичным отклонением).
Кроме приведенных основных видов классификации систем управления, существуют и другие классификации. Например, классификация может проводиться по методу управления и основываться на взаимодействии с внешней средой и возможности адаптации САУ к изменению параметров окружающей среды. Системы делятся на два больших класса:
1) Обыкновенные (несамонастраивающиеся) СУ без адаптации; эти системы относятся к разряду простых, не изменяющих свою структуру в процессе управления. Они наиболее разработаны и широко применяются. Обыкновенные СУ подразделяются на три подкласса: разомкнутые, замкнутые и комбинированные системы управления.
2) Самонастраивающиеся (адаптивные) СУ. В этих системах при изменении внешних условий или характеристик объекта регулирования происходит автоматическое (заранее не заданное) изменение параметров управляющего устройства за счет изменения коэффициентов СУ, структуры СУ или даже введения новых элементов.
Другой пример классификации: по иерархическому признаку (одноуровневые, двухуровневые, многоуровневые).











