Что такое TPM и как его использовать в Windows
Во многих компьютерах и ноутбуках сегодня можно встретить дополнительный чип, который называется TPM. В операционной системе он определяется в разделе «Устройства безопасности». Что это за зверь такой и для чего он, собственно, нужен мы и поговорим сегодня.
Расшифрование (decryption) иногда некорректно называют дешифрование (deciphering). Разница между ними в том, что при расшифровании вам известен алгоритм и секретный ключ, которым зашифрованы данные, а при дешифровании – нет.
- Во-первых, чип нужно активировать в BIOS компьютера (если он не активирован).
- Во-вторых, нужно стать его владельцем на уровне операционной системы.
Рассмотрим эти шаги более подробно.
· Перейти к описанию варианта программы замены МСД-100 объекта

Предложения после предварительного обследования.
- Вернуть исходное состояние системы путем восстановления порванного кабеля и установки ПО существующих устройств
- Добавить 2ой- rs -485 и использовать в существующем исправленном кабеле 2е линии рис_схема.

- После восстановления неисправности составить детальный план подключения и прохождения линии по объекту.
- Использовать программное обеспечение, поставляемое производителем .
3 Устройство и работа прибора
3.1 Принцип действия
3.1.1 Структурная схема
В процессе работы ТРМ212 производит опрос датчиков, вычисляя по полученным данным текущие значения измеряемых величин, отображает их на ЦИ и выдает соответствующие сигналы на выходные устройства. Структурная схема прибора приведена на рисунке 3.1.
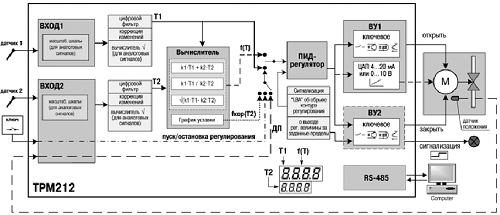
Рисунок 3.1
Прибор включает в себя:
— два универсальных входа для подключения датчиков;
— дополнительный вход для дистанционного управления процессом регулирования;
— блок обработки данных, состоящий из цифрового фильтра, вычислителя, ПИД-регулятора;
— два выходных устройства;
— интерфейс RS-485;
— два ЦИ для отображения регулируемой величины и ее уставки.
3.1.2 Измерительный вход
Порядок установки параметров измерительного входа см. п. 6.2.1.
К измерительному входу можно подключать любой из датчиков, перечисленных в таблице 3. Для измерения температур следует использовать ТС и термоэлектрические преобразователи (термопары). Для измерения других физических параметров могут быть использованы датчики, оснащенные нормирующими преобразователями этих параметров в унифицированные сигналы постоянного тока 4. 20 мА, 0. 20 мА, 0. 5 мА или напряжения минус 50. 50 мВ и 0. 1 В.
Особенности подключения датчиков описаны в п. 5.3.3, схемы подключения приведены в Приложении Б.
3.1.3 Дополнительный вход
Порядок установки параметров дополнительного входа описан в п. 6.2.1.1.
3.1.3.1 К дополнительному входу подсоединяют ключ. Ключом осуществляется запуск и остановка процесса регулирования (см. рисунок 3.1).
При замыкании ключа запускается процесс регулирования. При размыкании ключа прибор прекращает процесс регулирования и светится светодиод СТОП.
3.1.3.2 Логическое состояние ключа соответствует его электрическому сопротивлению:
— менее 1 кОм (замкнуто);
— более 100 кОм (разомкнуто).
При несоблюдении этих условий возникает неопределенность состояния дополнительного входа.
3.1.4 Цифровой фильтр
Порядок установки параметров цифрового фильтра см. в п. 6.2.2.
3.1.4.1 Для корректной работы прибор необходимо защищать от различных внешних воздействий и электромагнитных помех. Для этой цели рекомендуется использовать помехопо-давляющий фильтр в цепи питания ТРМ212, а в цепи управления параллельно выходным коммутирующим контактам установить искрогасящие элементы, например RC-цепочку. Кроме аппаратной защиты существует возможность использовать программный цифровой фильтр низких частот.
3.1.4.2 Цифровой фильтр подавляет помехи двух видов:
А) Сильные единичные помехи (рисунок 3.2). Если измеренное значение Тi отличается от предыдущего Ti-1 на величину, большую, чем значение Fb (заданная «полоса фильтра»), то прибор присваивает ему значение равное Ti-1 + Fb (рисунок 3.2), а полоса фильтра удваивается. Таким образом, характеристика сглаживается. Как видно из рисунка 3.2, малая ширина полосы фильтра приводит к замедлению реакции прибора на быстрое изменение входной величины. Поэтому при низком уровне помех или при работе с быстроменяющимися процессами рекомендуется увеличить значение полосы фильтра или отключить действие этого параметра. При работе в условиях сильных помех для устранения их влияния на работу прибора необходимо уменьшить значение полосы фильтра.
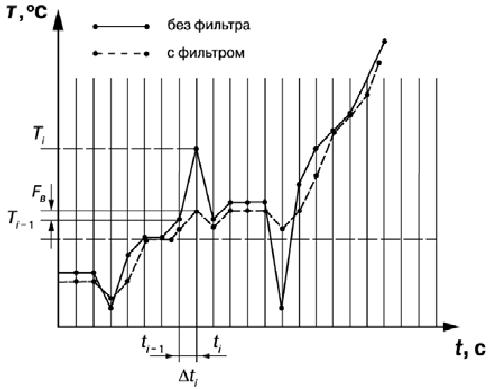
Рисунок 3.2
Б) Шумовые составляющие сигнала, осуществляя его экспоненциальное сглаживание. Основной характеристикой экспоненциального фильтра является постоянная времени τф — интервал, в течение которого сигнал достигает 0,63 от значения каждого измерения Ti, (рисунок 3.3). При больших значениях τф фильтр вносит значительное запаздывание, но шумы заметно подавлены (кривая II на рисунке 3.3). При τф, близких к нулю, фильтр довольно точно отслеживает изменения входного сигнала, но уровень шума практически не уменьшается (кривая I на рисунке 3.3).
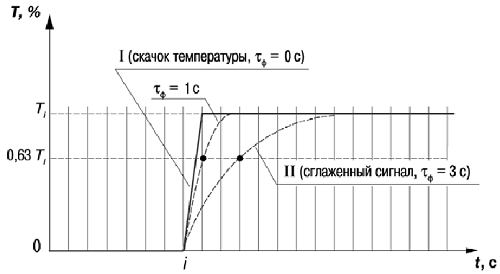
Рисунок 3.3
3.1.4.3 При установке оптимальных значений параметров фильтра (подробнее см. п. 6.2.2) задержка сигнала, вносимая фильтром, не будет оказывать отрицательного влияния на процесс регулирования, при этом сохранится эффективность подавления помех.
3.1.5 Коррекция результатов измерения
3.1.5.1 Порядок установки параметров коррекции измерительной характеристики датчика приведен в п. 6.2.1.6. З.1.5.1. Для устранения начальной погрешности преобразования входных сигналов и погрешностей, вносимых соединительными проводами, измеренное прибором значение может быть откорректировано. В ТРМ212 есть два типа коррекции, позволяющие осуществлять сдвиг или наклон характеристики на заданную величину.
3.1.5.2 Для компенсации погрешностей ΔR = R0 – R0,TCM, вносимых сопротивлением подводящих проводов RTCM при использовании двухпроводной схемы подключения ТС, к каждому измеренному значению параметра Тизм прибавляется заданное пользователем значение δ («сдвиг характеристики датчика»). На рисунке 3.4 приведен пример сдвига характеристики для датчика ТСМ (Cu50).
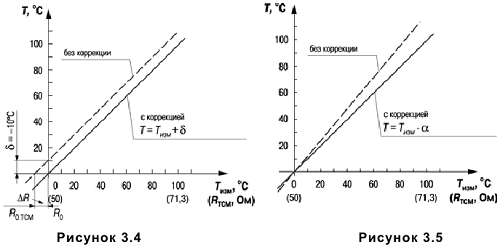
3.1.5.3 Для компенсации погрешностей датчиков при отклонении значения W100 от номинального каждое измеренное значение параметра Тизм умножается на заданный пользователем поправочный коэффициент а («наклон характеристики датчика»). Коэффициент задается в пределах от 0,5 до 2,0. На рисунке 3.5 приведен пример изменения наклона характеристики для датчика ТСМ (Cu50).
3.1.6 Вычислитель
Порядок установки параметров Вычислителя приведен в п. 6.2.3.1.
3.1.6.1 Вычислитель производит вычисление физической величины по одному или нескольким входным значениям. В приборе ТРМ212 к Вычислителю можно подключить только два источника данных, которыми являются собственные входы прибора.
Вычислитель жестко связан с регулятором. Входным параметром для ПИД-регулятора служат данные с выхода Вычислителя.
3.1.6.2 Вычислитель производит одну математическую операцию с входными величинами:
– Средневзвешенной суммой: (К1 x PV1 + К2 x PV2);
– Отношением (K1 x PV1 / K2 x PV2);
– Квадратным корнем из средневзвешенной суммы √(K1 x PV1 + K2 x PV2),
где: PV1 — величина, измеренная на Входе 1;
PV2 — величина, измеренная на Входе 2;
К1, К2 — весовые коэффициенты Входа 1 и Входа 2.
ТРМ212 с функцией Вычислителя позволяет реализовать наиболее распространенные задачи, например:
— регулирование соотношения (используя операцию вычисления отношения с любыми коэффициентами K1, K2 ),
— вычисление и регулирование разности двух величин (используя операцию вычисления средневзвешенной суммы, K1 = 1, K2 = -1;
— регулирование и измерение расхода с помощью диафрагм, сопел или трубок Вентури (используя операцию вычисления корня из средневзвешенной суммы с коэффициентами K1, K2, рассчитанными по методике, приведенной в Приложении И).
3.1.7 ПИД-регулятор
Порядок установки параметров регулирования приведен в п. 6.2.3.
3.1.7.1 Общие принципы ПИД-регулирования
3.1.7.1.1 ПИД-регулятор вырабатывает управляющий (выходной) сигнал, действие которого направлено на уменьшение отклонения текущего значения регулируемой величины от уставки. Выходной сигнал ПИД-регулятора Yi рассчитывается по формуле:

где Xp — полоса пропорциональности;
Ei — разность между уставкой и текущим значением контролируемой величины PVi, или рассогласование;
τд – постоянная времени дифференцирования;
ΔEi – разность между двумя соседними измерениями Ei и Ei-1;
Δtизм – время между двумя соседними измерениями PVi и PVi–1;
τи – постоянная времени интегрирования;
∑Ei — накопленная в i-й момент времени сумма рассогласований (интегральная сумма).
Как видно из формулы (1), сигнал управления зависит от:
1) Рассогласования Ei, которое отвечает за реакцию на мгновенную ошибку регулирования.
Отношение Ei / Xp называется «пропорциональной составляющей» выходного сигнала.
2) Накопленной ошибки регулирования ∑Ei x Δtизм, которая позволяет добиться максимальной скорости достижения уставки.
Выражение (1 / Xp)(1 / τи) ∑Ei x Δtизм называется «интегральной составляющей» выходного сигнала.
3) Скорости изменения рассогласования ΔEi/Δtизм, которая позволяет улучшить качество переходного процесса.
Выражение (1 / Xp) τд ΔEi/Δtизм называется «дифференциальной составляющей» выходного сигнала.
3.1.7.1.2 Для эффективной работы ПИД-регулятора необходимо подобрать для конкретного объекта регулирования значения коэффициентов ПИД-регулятора Xp, тд и ти. Их можно определить в режиме АВТОНАСТРОЙКА (см. п. 7.1) или подобрать при РУЧНОЙ НАСТРОЙКЕ (п. 7.2).
3.1.7.1.3 При аналоговом управлении выходной сигнал ПИД-регулятора преобразуется в пропорциональный ему ток или напряжение.
При управлении 3-х позиционным ИМ (п. 3.1.9.1) выходной сигнал ПИД-регулятора преобразуется в сигналы «больше», «меньше», «стоп» по следующему принципу:
1) рассчитывается длительность импульса:
tимп = ΔY x tпх, (2)
где: ΔY = Y(i) – Y(i-1) – приращение выходного сигнала,
tпх – время полного хода задвижки;
2) выдается воздействие на ИМ:
– при ΔY > 0 включается ВУ1 («больше») на время равное tимп,
– при ΔY < 0 включается ВУ2 («меньше») на время равное tимп,
– при ΔY = 0 ВУ остаются в прежнем состоянии («стоп»).
3.1.7.2 Прямое и обратное управление
При регулировании выбирают один из методов управления системой: прямое или обратное.
При прямом управлении значение выходного сигнала регулятора увеличивается с увеличением измеряемой величины (рисунок 3.6). При обратном управлении значение выходного сигнала регулятора уменьшается с увеличением измеряемой величины. Например, в системе нагревания по мере роста температуры значение выходного сигнала уменьшается, этот процесс имеет обратное управление.
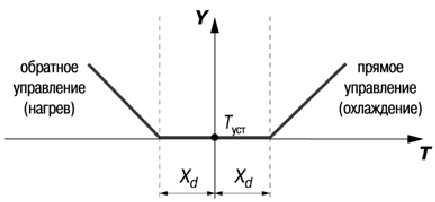
Рисунок 3.6
3.1.7.3 Зона нечувствительности
Для исключения излишних срабатываний регулятора при небольшом значении рассогласования Еi для вычисления Yi по формуле (1) используется уточненное значение Ер, вычисленное в соответствии с условиями:
– если |Еi| < Хd, то Еp = 0,
– если Еi > Хd, то Еp = Еi – Хd,
– если Еi < – Хd, то Еp = Еi + Хd ,
где Хd – зона нечувствительности (см. рисунок 3.6).
Прибор будет выдавать управляющий сигнал только после того, как регулируемая величина выйдет из этой зоны. Зона нечувствительности не должна превышать необходимую точность регулирования.
3.1.7.4 Скорость изменения уставки
Если значение уставки необходимо изменить в процессе работы, то переход с одного значения на другое можно сгладить, задав «скорость изменения уставки». При скорости изменения уставки отличной от 0, уставка меняется не скачком, а линейно, с заданной скоростью.
В качестве начальной уставки принимается текущее значение регулируемого параметра на момент включения регулятора и каждую минуту уставка регулятора изменяется на величину, заданную в этом параметре.
При использовании ограничения скорости изменения уставки возрастает время выхода на рабочий режим. Поэтому, если задержка приводит к неудовлетворительным результатам, нужно увеличить значение этого параметра или отключить его действие.
3.1.7.5 Ограничение выходного сигнала
В ТРМ212 можно установить максимальное Yorp.max и минимальное Yorp.min ограничения выходного сигнала, которые определяют соответственно минимальную и максимальную степень открытия задвижки (рисунок 3.7).
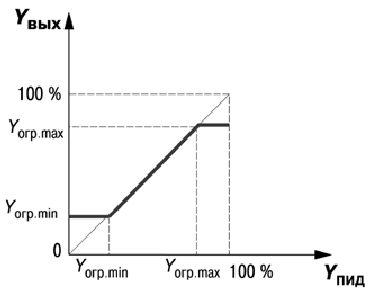
Рисунок 3.7
3.1.7.6 График коррекции уставки
Порядок установки параметров графика коррекции уставки описан в п. 6.2.3.1.2.
В ряде случаев требуется, чтобы уставка не являлась константой, а изменялась в зависимости от какого-то внешнего параметра. Например, в системах отопления температура теплоносителя должна меняться в зависимости от температуры наружного воздуха. Для решения этой задачи в ТРМ212 введен График коррекции уставки, который представляет собой зависимость корректирующего значения уставки от внешнего параметра.
Для Графика можно задать до 10 узловых точек, которые автоматически соединяются отрезками, образуя ломаную линию. В качестве внешнего параметра используется величина, измеренная на Входе 2. В процессе работы вычисленное по графику корректирующее значение прибавляется к уставке, и прибор будет поддерживать вместо жестко заданной уставки скорректированное по графику значение:
Уставка конечная = Заданная уставка (SP) + Корректирующее значение уставки (SРкор) (3)
Вид и механизм работы Графика коррекции уставки для 1, 2 . n точек показаны на рисунках 3.8, а, 3.8, б и 3.8, в, соответственно.
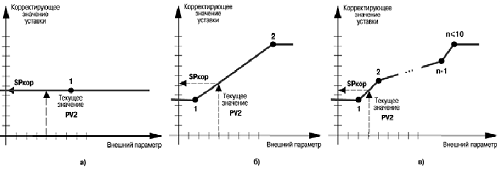
Рисунок 3.8
3.1.8 Устройства аварийной сигнализации
Порядок установки параметров устройств аварийной сигнализации описан в п. 6.2.4.
3.1.8.1 Общие сведения
Для более эффективного контроля за процессами регулирования в приборе имеется устройство диагностики обрыва контура — LВА, а также логическое устройство, работающее по принципу компаратора.
При срабатывании устройства диагностики обрыва контура процесс регулирования останавливается и засвечивается светодиод LВА При срабатывании компаратора процесс регулирования продолжается, но светится светодиод К2 и на ВУ2 подается аварийный сигнал. К ВУ2 могут быть подключены различные сигнальные устройства: сирена, лампа, блокировочный выключатель, блок принудительного (аварийного) охлаждения или нагревания и т.п.
Внимание! Компаратор имеется только в приборах с ВУ1 аналогового типа. Свечение светодиода К2 в приборе с ВУ1, ВУ2 ключевого типа свидетельствует не о срабатывании компаратора, а о подаче на ВУ2 сигнала на закрытие задвижки.
3.1.8.2 Сигнализация об обрыве в контуре регулирования
3.1.8.2.1 Устройство LBA срабатывает в том случае, когда значение регулируемого параметра не меняется в течение определенного времени при подаче максимального (минимального) управляющего воздействия. Это означает, что в контуре регулирования произошел обрыв. Работа сигнализации об обрыве контура задается двумя параметрами: «время диагностики обрыва контура» и «ширина зоны диагностики обрыва контура».
3.1.8.2.2. Устройство выдает сигнал тревоги, если по истечении времени диагностики обрыва контура измеренное значение не изменилось:
— для процесса нагрева при максимальном выходном сигнале — не увеличилось, при минимальном — не уменьшилось;
— для процесса охлаждения при максимальном выходном сигнале — не уменьшилось, при минимальном — не увеличилось.
При этом регулятор отключается.
Пример. В точке А нагреватель вышел из строя, и температура начинает уменьшаться (рисунок 3.9,а). Регулятор увеличивает значение выходного сигнала (рисунок 3.9, б), контролируя отклик системы. Поскольку температура продолжает уменьшаться, рассогласование растет и значение Y достигает 100 %. В момент достижения Y = 100 % (точка В) прибор начинает отсчет «времени диагностики обрыва контура» Δt.
Если по истечении этого времени температура продолжает уменьшаться, сигнализация срабатывает (кривая I на рисунок 3.9,а). Если температура стала расти, но за время 4t изменение температуры не превысило «ширину зоны диагностики обрыва контура» (кривая II на рисунке 9,а), сигнализация также срабатывает (рисунок 3.9,в).
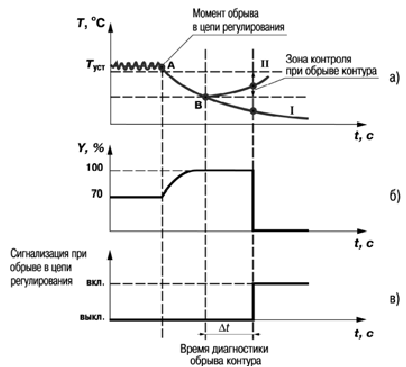
Рисунок 3.9
3.1.8.3 Компаратор
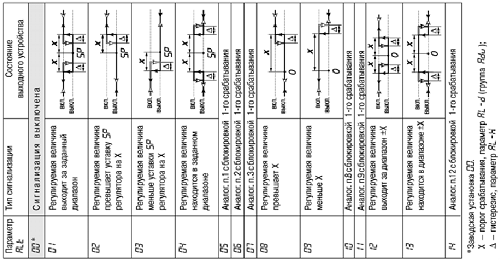
3.1.8.3.1 В зависимости от системы регулирования пользователь может задать параметры срабатывания компаратора, сигнализирующего о выходе регулируемой величины за допустимые пределы. В приборе заложено четырнадцать типов логики срабатывания компаратора (таблица 3.1). Кроме того, пользователь задает порог срабатывания компаратора Х и гистерезис Δ для устранения ненужных срабатываний из-за колебаний контролируемой величины вокруг порогового значения.
Компаратор сигнализирует об аварийной ситуации, при этом регулятор продолжает работать.
Таблица 3.1 – Типы сигнализации о выходе регулируемой величины за заданные пределы
3.1.8.3.2 Функция блокировки первого срабатывания позволяет исключить включение сигнализации при включении питания.
Эта функции используется, например, при установке в системе нагревания, поскольку, как правило, значение измеряемой величины в этой системе изначально находится ниже уставки.
Пример. Сигнализация с типом логики 5 в системе нагревания. На рисунке 3.10 показаны диаграммы работы компаратора без блокировки первого срабатывания (тип логики 1) (рисунок 3.10, б), и с блокировкой (тип логики 5) (рисунок 3.10, в).
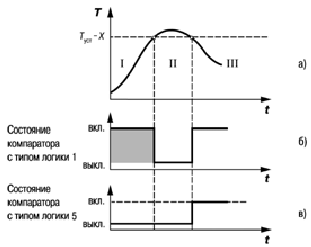
Рисунок 3.10
При использовании типа логики 1 в момент включения прибора, когда регулируемая величина ниже порога Туст — Х, происходит нежелательное срабатывание компаратора (заштрихованная площадь на рисунок 3.10, б), когда реально аварийной ситуации нет. При использовании типа логики 5 нежелательного срабатывания не происходит.
После включения прибора выход компаратора будет находиться в состоянии «выключено» до первого превышения порога Туст — Х, и только когда регулируемая величина снова выйдет на порог Туст — Х (этап III), выход компаратора впервые перейдет в состояние «включено» — сигнализация сработает. Далее компаратор будет работать так же, как с типом логики 1.
3.1.9 Выходные устройства прибора
ВУ предназначены для передачи управляющего сигнала на исполнительные механизмы.
3.1.9.1 Ключевое ВУ — электромагнитное реле, транзисторная оптопара, оптосимистор, выход для управления твердотельным реле — используется для управления (включения/выключения) нагрузкой либо непосредственно, либо через более мощные управляющие элементы, такие как пускатели, твердотельные реле, тиристоры или симисторы.
Прибор ТРМ212 с однотипными ВУ1 и ВУ2 ключевого типа используется только для управления трехпозиционным ИМ (задвижкой, трехходовым клапаном), который имеет электрический привод, две пары контактов для управления направлением его вращения. При подаче управляющих импульсов на первую пару контактов задвижка перемещается в одну сторону, например открывается, при подаче импульсов на вторую — закрывается.
Примечание. Трехпозиционный ИМ — далее по тексту «задвижка».
3.1.9.2 ВУ аналогового типа — это цифроаналоговый преобразователь, который формирует ток 4. 20 мА или напряжение 0. 10 В и используется только для управления ИМ типа «задвижка с аналоговым управлением» (электропневмопозиционеры).
3.1.9.3 Особенности подключения выходных устройств приведены в п. 5.3.2.
3.1.10 Интерфейс связи RS-485
Интерфейс связи предназначен для включения прибора в сеть, организованную по стандарту RS-485. Использование прибора в сети RS-485 позволяет осуществлять следующие функции:
1. Сбор данных об измеряемых величинах и протекании процессов регулирования в системе SCADA.
2. Установка параметров прибора с помощью программы «Конфигуратор ТРМ2хх».
3. Дистанционное управление процессом регулирования и автонастройки с помощью программы «Конфигуратор ТРМ2хх», работающей в среде Windows.
RS-485 является широко распространенным в промышленности стандартом интерфейса, обеспечивает создание сетей с количеством узлов (точек) до 256 и передачу данных на расстояние до 1200 м. При использовании повторителей количество подключенных узлов и расстояние передачи может быть увеличено. Для соединения приборов применяется экранированная витая пара проводов, к которым предъявляются следующие требования: сечение не менее 0,2 мм2 и погонная емкость не более 60 пФ/м.
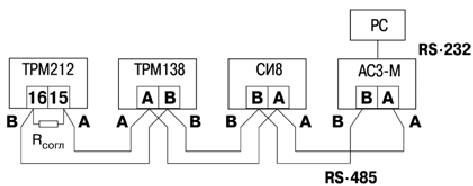
Рисунок 3.11
Все приборы в сети соединяются в последовательную шину (рисунок 3.11). Для качественной работы приемопередатчиков и предотвращения влияния помех линия связи должна иметь на концах согласующий резистор сопротивлением Rсогл = 120 Ом, подключаемый непосредственно к клеммам прибора (см. рисунок 3.11).
Подключение прибора к персональному компьютеру осуществляется через адаптер интерфейса RS-485/RS-232, в качестве которого может быть использован адаптер ОВЕН АС3, АС3-М или АС4
Примечания
1) Адаптер интерфейса ОВЕН имеет согласующий резистор сопротивлением Rсогл = 120 Ом внутри.
2) C описанием протокола обмена, списком параметров, программой пользователь может ознакомиться на сайте www.owen.ru. Обмен может осуществляться с одной из скоростей стандартного ряда: 2400, 4800, 9600, 14400, 19200, 28800, 38400, 57600, 115200 бит/с.
3.2 Конструкция прибора
3.2.1 Корпус
3.2.1.1 Прибор конструктивно выполнен в пластмассовом корпусе, предназначенном для щитового или настенного крепления. Эскизы корпусов с габаритными и установочными размерами приведены в Приложении А.
3.2.1.2 Для установки прибора в щит в комплекте прилагаются крепежные элементы.
3.2.1.3 На лицевой панели расположены клавиатура управления прибором, ЦИ и светодиоды, на задней — силовая и измерительная части.
3.2.1.4 Клеммник для подсоединения внешних связей (датчиков, выходных цепей и питания) у приборов щитового крепления находится на задней стенке. В приборах настенного крепления клеммник расположен под верхней крышкой. В отверстиях подвода внешних связей установлены резиновые уплотнители.
3.2.2 Индикация и управление
3.2.2.1 На рисунке 3.12, а приведен внешний вид лицевой панели прибора ТРМ212 для корпусов настенного (Н) и щитового (Щ1) крепления, а на рисунке 12,б — щитового (Щ2).
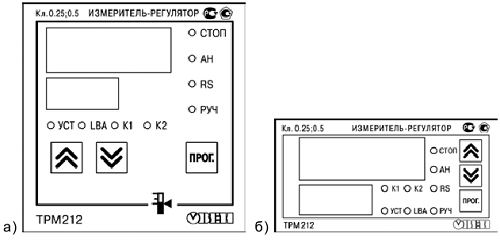
Рисунок 3.12
3.2.2.2 На лицевой панели расположены следующие элементы управления и индикации:
Верхний ЦИ красного цвета отображает:
— текущие значения измеряемых величин;
— сообщения об ошибках;
— название параметра в режиме ПРОГРАММИРОВАНИЕ;
— надпись nEnU при просмотре МЕНЮ.
Нижний ЦИ зеленого цвета отображает:
— текущие значения измеряемых величин, уставок и выходного сигнала регулятора;
— значение параметра в режиме ПРОГРАММИРОВАНИЕ;
— название группы параметров при просмотре МЕНЮ.
Светодиоды:
К1 — светится при включенном выходном устройстве 1;
К2 — светится при включенном выходном устройстве 2;
УСТ — светится в режиме редактирования уставки;
LBA — мигает, если обнаружен обрыв в контуре регулирования;
СТОП — постоянно светится, если регулятор остановлен;
— мигает, если остановка регулятора произошла из-за аварии LBA или аппаратной ошибки;
АН — постоянно светится при выполнении автонастройки;
— гаснет при удачном завершении автонастройки;
— мигает, если автонастройка закончена неудачно;
RS — засвечивается на 0,1 с в момент передачи данных компьютеру
— постоянно светится в режиме дистанционного управления регулятором;
3.2.2.3. Кнопки, находящиеся на передней панели прибора, имеют следующее назначение:
«∧» — для увеличения значения программируемого параметра;
«∨» — для уменьшения значения программируемого параметра;
[ПРОГ] — для входа в меню программирования и для перехода к следующему параметру.
При работе с прибором ТРМ212 для входа в специальные режимы работы прибора используются комбинации кнопок:
[ПРОГ] + «∧» + «∨» — для перехода к установке кодов доступа;
[ПРОГ] + «∧» — для перехода в режим ручного управления регулятором.











