Как подключить электродвигатель к Arduino
Как известно, электродвигатели бывают трёх основных типов: коллекторные, шаговые и сервоприводы. В данной статье мы рассмотрим подключение коллекторного электродвигателя к Arduino с помощью драйвера двигателей на основе микросхемы L9110S или аналогичной.
Для проекта нам понадобятся:
-
или аналогичный; , или шилд на микросхеме L293D или аналогичный; или аналогичный; или иная совместимая плата;
- соединительные провода (например, вот такой набор); ;
- персональный компьютер со средой разработки Arduino IDE.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Шаговый двигатель и драйвер для него

Здесь вы узнаете, что такое шаговый двигатель, познакомитесь с принципом его работы, а также рассмотрите простые схемы и драйвера управления шаговым двигателем. На практике проанализируете работу и управление драйвером шагового электродвигателя с помощью параллельного порта персонального компьютера.


Шаговые двигатели широко используются в приложениях, требующих огромную точность. В отличие от электродвигателя постоянного тока у него отсутствуют щетки и коммутатор — для этого у него имеется несколько отдельных обмоток, которые коммутируются внешней электронной управляющей схемой или как ее принято называть одним словом — драйвером. Вращение ротора в них осуществляется с помощью коммутации обмоток последовательно — шаг за шагом, без обратной связи. Здесь можно увидеть огромный минус всех шаговых двигателей — в случае механической перегрузки, когда ротор не двигается, шаги будут путаться и движение становится непредсказуемым.
По виду обмоток, шаговые двигатели бывают: униполярными и биполярными. По строению их можно классифицировать еще на как минимум три вида:
- С переменным магнитным сопротивлением: эти электродвигатели обеспечивают высоченную точность перемещения и очень низкий крутящий момент
У шаговых двигателей первого типа зубчатые обмотки и ротор сделаны из стали. Максимальная сила тяги появляется в момент перекрытия зубьев обоих сторон. В электродвигателях с постоянным магнитом, имеется постоянный магнит, который ориентируется в зависимости от полярности обмотки. В гибридных сочетают две технологии одномоментно.
Независимо от вида устройства для создания одного полного оборота вала равному 360 градусов необходима целая сотня шагов коммутаций. Для обеспечения плавного и стабильного движения используют подходящую схему управления (драйвер), в соответствии с параметрами шагового двигателя (крутящий момент, инертность ротора, резонанс и т.п.). Кроме того схема драйвера может использовать различные способы коммутации.
Последовательный метод коммутации по одной обмотке называют полным шагом, но если коммутация происходит поочередно одна и две обмотки, то это принято называть полушагом. Бывают так же синусоидальные микрошаги, что дает им высокую точность и плавность хода.
Шаговый двигатель используется для изготовлении печатных плат, микродрели, автоматической кормушки и в конструкциях роботомеханизированных аппаратов. Если вы еще не сталкивались с шаговыми двигателями, то прочитайте внимательно эту статью.
Он имеет пять или шесть проводов. В соответствии со схемой запускается разом только одна четвертая обмоток. Линии Vcc обычно соединяются с плюсом источника питания. Концы обмоток 1a, 1b, 2a, и 2b соединяются при коммутации через управляющие транзисторы только с землей, в связи, с чем их схема драйвера достаточно проста.
Полярность его обмоток изменяется во время процесса коммутации. За один раз активируется 50% обмоток, что обеспечивает в сравнении с выше рассмотренным гораздо большую эффективность. У биполярных шаговых двигателей имеется только четыре провода, которые соединяютсяполумостом. При коммутации полумосты прикладывают к концам обмоток с отрицательным или положительным напряжением. Их запускают и с помощью биполярного драйвера: для этого необходимо соединить только линии обмоток 1a, 1b, 2a и 2b.
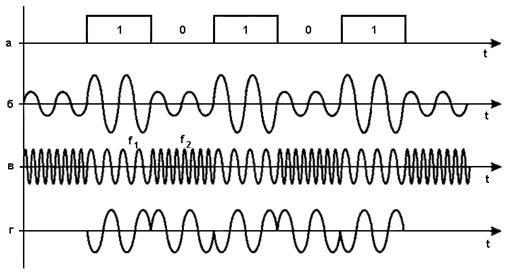
Необходимые коммутации полу и полного шага и с обоими видами обмоток отображает таблица на рисунке ниже. Т.к в случае драйвера униполярного шагового двигателя происходит только отпирание управляющих транзисторов, то эти шаги в ней представлены логическими числами 1 и 0. Управление биполярным ШД может потребовать гораздо больше сигналов, и его шаги представлены выходной полярностью схемы управления.
Шаговые двигатели отличаются от обычных управляемых двигателей постоянного тока тем что, совершают дискретное вращение под воздействием импульсных управляющих сигналов. В конкретном шаговом двигателе, который мы будем рассматривать, требуется 48 управляющих импульсов чтобы сделать полный оборот на 360 градусов.
Еще одним важным преимущество шаговых двигателей можно считать то, что их скорость вращения может быть достигнута почти мгновенно при реверсировании направления вращения.
В состав шагового двигателя входит ротор, представляющий обычный постоянный магнит, вращающийся внутри, и статор на четыре катушки, являющиеся частью корпуса и неподвижные. Ротор вращается от поступающих импульсных последовательностей подаваемых к одной или двум катушкам одномоментно.
Для схемы драйвера шаговым двигателем потребуется контроллер. Контроллер это такая большая специализированная микросхема, которая подает постоянное напряжение к любой из четырех катушек статора в зависимости от заложенной программы. В нашей схеме такой микросхемой является ULN2003 или ее российский аналог К1109КТ22, состоящий из множества мощных ключей с защитными диодами. Последнии дают возможность подключать различные индуктивные нагрузки без дополнительной защиты от всплесков обратного напряжения.
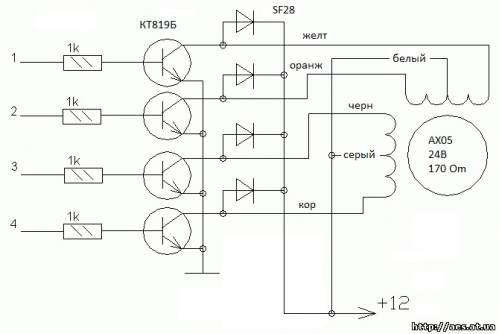
Однополярный двигатель обладает пятью или шестью контактов в зависимости от типа. Если он имеет шесть контактов, то потребуется соединить выводы 1 и 2 красного цвета вместе и подключить их к плюсу напряжения питание. Оставшиеся выводы a1 желтого, b1 черного, a2 оранжевого и b2 коричневого цвета и подключить к контроллеру в соответствии со схемой.
Существует несколько способов, которые можно использовать, для управления шаговым двигателем.
Для управления шаговым двигателем с компьютером нам потребуется только компьютер с LPT разъемом или специализированном контроллере, который можно недорого приобрести и вставить в PCI слот материнской платы и программа. Программу вы можете скачать по зеленой ссылке чуть выше. При управление шаговым двигателем с компьютера вы будете иметь намного больше возможностей при конструировании различных радиолюбительских самоделок или приспособлений.

В программе управления драйвером очень понятный и дружественный интерфейс для работы с шаговым двигателем, который дает возможность точно управлять скоростью шагового двигателя и направлением его вращения в режиме реального времени, а также вы сможете выбрать различные способы управления.
Схема драйвера дает возможность изменять скорость вращения вала и направление его вращения. Частота микроконтроллера формируется внешним генератором на 4 МГц. На радиокомпонентах R1 – R3, С1 и транзисторе VT1 собран генератор прямоугольных импульсов, частоту которого можно регулировать сопротивлением R2. Напряжение с емкости конденсатора С1 поступает на вывод RB5 микроконтроллера. После того как потенциал превысит пороговый уровень, на выводе RB7 образуется высокий потенциал. Поэтому, первый транзистор открывается и разряжает емкость, а затем алгоритм повторяется.
При регулирование сопротивления R2 изменяется скорость вращения шагового двигателя от 27 до 128 оборотов в минуту. Учтите, что при повышении скорости вращения, снижается крутящий момент на валу шагового двигателя. Данная схема не имеет ОС, поэтому скорость вращения зависит только от переменного резистора R2 и от нагрузки на вал. Реверс обмоток двигателя осуществляется через транзисторные ключи VT2-VT5. Для защиты транзисторов от возможных всплесков, в схему введены диоды VD1 — VD4. Изменение направления вращения и остановка задается с помощью тумблеров SA1 — SA3. Прошивку к МК смотри в архиве выше, в папке 029-el
Рассмотрена схема управления шаговым двигателем униполярного типа в режиме полного шага через последовательный интерфейс RS232 компьютера. Драйвер способен управлять двумя шаговыми двигателями через программу специальную терминал
При замыкании кнопок управления SB-1 или SB-2 высокий логический уровень через элемент ИЛИ реализованный на диодах VD-6 и VD-7 следует на затвор полевого транзистора VT-5, отпирая его, и тем самым включая питание двигателя. Диоды можно можно взять почти любые, кремниевые, какие влезут. Полевой транзистор выбираем исходя из напряжения питания и потребляемого тока ШД. Если используется низковольтный ЩД, то и транзистор в схеме берем низковольтный, так как у него ниже сопротивление сток-исток.
Желательно и в роли VT1-VT5, так же применить полевые транзисторы с N-каналом. Тогда сопротивление резисторов в цепи базы (по схеме) можно существенно снизить.
Таймер NE555 предназначен для генерации потока тактовых импульсов управляющими скоростью вращения шагового двигателя. Тогда как логические микросхемы CD4070 аналог К1561ЛП14 и CD4027 аналог K561ТВ формируют последовательность сигналов в нужном порядке, для запуска электродвигателя.
Схема подходит для однополярного шагового двигателя, имеющего шесть управляющих выводов. Изменяя сопротивление переменного резистора можно изменять частоту сигнала, а следовательно и скоростью вращения электродвигателя. Затем импульсы поступают на входы JK-тригеров на микросхеме CD4027, которые формируют управляющие импульсы в нужной последовательности. При помощи переключателя SA1 можно осуществлять реверсирование шагового двигателя.
Выбор контроллера мотора
Контроллеры двигателей можно выбрать только после того, как вы выбрали свои двигатели, приводы. Кроме того, номинальный ток двигателя связан с крутящим моментом, который он может обеспечить. Так как маленький двигатель постоянного тока не потребляет много тока, но не может обеспечить большой крутящий момент. Тогда как большой двигатель может обеспечить более высокий крутящий момент, но для этого потребуется более высокий ток.
Управление двигателем постоянного тока
Первое соображение — это номинальное напряжение двигателя. Устройства управления электродвигателями постоянного тока обычно предлагают диапазон напряжения. Например, ваш двигатель работает с номиналом 3 В. Следовательно вам не следует выбирать контроллер двигателя, который может управлять двигателем только между 6 и 9 В. Это поможет вам исключить некоторые контроллеры двигателя из списка.
Итак, вы нашли ряд контроллеров, которые могут приводить в действие двигатель с соответствующим напряжением. Следующим соображением будет постоянный ток, который контроллер должен будет подавать. Вам нужно найти контроллер двигателя, который будет обеспечивать ток, равный или превышающий номинальный ток, потребляемый двигателем.
Если вы выберете контроллер двигателя 5А для двигателя 3A, то двигатели будут потреблять столько тока, сколько потребуется. С другой стороны, двигатель на 5А, скорее всего, выведет контроллер на 3A. Многие производители двигателей обеспечивают ток выключения двигателя постоянного тока. В результате это не дает вам четкого представления о контроллере двигателя, который вам понадобится. То есть вы не можете найти постоянный рабочий ток двигателя. В этом случае простым правилом является оценка постоянного тока двигателя примерно на 20-25% меньше тока останова.
Все контроллеры двигателя постоянного тока обеспечивают максимальный ток. Убедитесь, что этот показатель примерно в два раза выше, чем номинальный ток двигателя. Обратите внимание, что, когда двигателю требуется больше крутящего момента (например, движение вверх по склону), он требует большего тока. Выбор контроллера двигателя со встроенным охлаждением и тепловой защитой — очень хороший выбор. Еще одним важным соображением является метод управления.

ШИМ управление моторами
Устройства управления электродвигателями используют следующие методы:
- аналоговое напряжение
- I2C (интерфейсная шина IIC )
- PWM (широтно-импульсная модуляция — ШИМ)
- R / C (Radio Control, радиоуправление)
- UART (универсальный асинхронный приемопередатчик)
Если вы используете микроконтроллер, проверьте, какие типы соединений у вас имеются, и какие двигатели являются совместимыми для вас. Если ваш микроконтроллер имеет последовательные контакты, вы можете выбрать контроллер последовательного двигателя. Для PWM вам, вероятно, потребуется один канал PWM на двигатель.
Методы контроля
На практике остается выбрать какой контроллер двигателя нужен — одиночный или двойной. Двойной контроллер постоянного тока может управлять скоростью и направлением двух двигателей постоянного тока независимо. Наконец часто экономит ваши деньги (и время).
Двигатели не обязательно должны быть идентичными. Хотя для мобильного робота приводные двигатели должны быть в большинстве случаев одинаковыми. Вам нужно выбирать двойной контроллер двигателя на основе более мощного двигателя постоянного тока.
Обратите внимание, что контроллеры двух двигателей имеют только одну входную мощность. Потому что если вы хотите контролировать один двигатель на 6 В, а другой на 12 В, это будет невозможно. Обратите внимание, что действующее напряжение всегда поддерживается на каждом канале. Стандартные сервомоторы предназначены для использования определенных напряжений для максимальной эффективности. Большинство из них работают от 4,8 В до 6 В, а их потребление тока аналогично, шаги для выбора несколько упрощены.
Тем не менее вы можете найти сервомотор, который работает при напряжении 12 В. При этом важно, чтобы были дополнительные сведения о контроллере, если ваш сервомотор не считается «стандартным». Также большинство хобби-сервомоторов используют стандартный сервопривод R / C. Это три провода, которые являются землей, напряжением и сигналом.
Теперь нужно выбрать метод управления. Некоторые контроллеры сервомоторов позволяют вам управлять положением сервопривода вручную с помощью набора кнопок / переключателей. Другие — с помощью команд UART (последовательных) или других средств. Определите количество сервоприводов, которые нужно контролировать.
Контроллеры могут управлять многими сервоприводами (обычно 8, 16, 32, 64 и выше). Вы, конечно же, можете выбрать контроллер серводвигателя, способный управлять большим количеством сервомеханизмов, чем вам потребуется. Как и контроллеры двигателя постоянного тока, метод управления является важным фактором.
Управление шаговым двигателем
Какой вы выбрали двигатель — однополюсный или двухполюсный? Выберите тип контроллера шагового двигателя соответственно, хотя почти все устройства управления электродвигателями могут управлять обоими типами. Количество проводов обычно помогает определить тип двигателя. Если двигатель имеет 4 провода, то он является двухполюсным. Если он имеет 6 или более контактов, то он является однополюсным. Выберите диапазон напряжения контроллера двигателя, чтобы он соответствовал номинальному напряжению вашего двигателя.

шаговый двигатель
Определите, сколько тока требуется для каждого мотора, и узнайте, сколько тока (на катушку) контроллер шагового двигателя может обеспечить. Если вы не можете найти ток катушки, то большинство производителей указывает сопротивление катушки, R. Используя Закон Ома (V = IR), вы можете рассчитать ток (I). Как и для контроллера двигателя постоянного тока, метод управления является важным фактором.
Управление линейным приводом
Линейные приводы имеют три основных метода управления: DC, R / C или обратная связь. Большинство линейных приводов постоянного тока используют редукторный двигатель постоянного тока. Поэтому обычно необходим контроллер постоянного тока.
Однако некоторые линейные приводы принимают сервопривод R / C, поэтому вы выбираете контроллер серводвигателя. Если управляемый R / C линейный привод работает с более высоким напряжением, чем диапазон контроллера, привод может включать в себя отдельные провода для более высокого требуемого напряжения питания.

линейный привод
Другие приводы — это многочисленные электромеханические устройства. Например, искусственные мышцы из проволоки или соленоиды также должны управляться с помощью контроллеров двигателей. Ниже приведены некоторые вопросы для того, чтобы определить, нужен ли вашему приводу контроллер двигателя.
- Более высокие требования к току: любое устройство, требующее более 0,1A, обычно нуждается в собственном контроллере.
- Более высокие требования к напряжению: если привод работает выше напряжения микроконтроллера (обычно 5 В или 3,3 В) он обычно не может быть напрямую подключен к микроконтроллеру.
Плата управления шаговым двигателем без компьютера
Чем меньше сопротивление R4 тем больше скорость вращения !
В данном включении запитывать двигатель лучше напряжением 9±2В, при меньшем он начинает проскальзывать, при большем – греется. Максимальная частота генератора, которая не приводит к проскальзыванию – 400 Гц (при Uпит=7В). Транзисторы – можно использовать любые MOSFET, с током стока не менее 0,5 А. Переключатель направления – тумблер ТП1-2 или кнопка П2К. П2К вообще-то не рекомендую. Отстой. Сколько не видел схем с ними — везде неисправность одна — не работают именно они. В принципе, для этих шаговых двигателей рекомендуютсхему с запускающим импульсом длиной 150 мкс и амплитудой 15-18В, но это приводит к усложнению схемы, а наша цель – простота. Для тех, кто интересуется шаговыми двигателями, можно сходитьсюда, здесь много полезной информации.
Генератор импульсов можно сделать, например, на 555 таймере. Вариант с регулируемой частотой от 1,5 до 450 Гц приведен на рис.
Схема подключения 6-ти выводного двигателя типа — АХ05 :
| Дата: 28-09-2010, 11:30, Просмотров: 74976, Автор: Nikolai4 |
Уважаемый посетитель, Вы зашли на сайт как незарегистрированный пользователь. Мы рекомендуем Вам зарегистрироваться либо войти под своим именем.
Электротехника
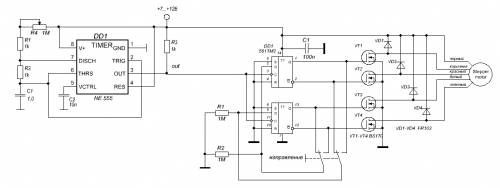
Шаговые двигатели полезны при управлении ими программируемым устройством но тем не менее могут возникать случаи когда в сложном управлении шаговым двигателем нет необходимости и нужен, всего лишь, большой крутящий момент и/или низкие обороты. Схема простого контроллера шагового двигателя приведена на рисунке:

Контроллер состоит из мультивибратора на таймере 555, микросхемы десятичного счётчика 4022 (CD4022, HEF4022 и т.д.) и необязательных светодиодов с резистором для визуализации и наглядности, резистор один т.к. больше одного светодиода в данной схеме светиться не может. Счётчик десятичный т.е. при подаче на его тактовый вход (CLOCK (вывод 14)) импульсов напряжения на выводе соответствующему выходу номер которого совпадает с количеством поданных импульсов, после сброса, появляется напряжение уровня логической единицы, на всех остальных выводах выходов, при этом, устанавливаются напряжения уровня логического нуля. Вывод «11» соединён с выводом «15» для того чтобы ограничить счёт данного счётчика. Когда на тактовый вход приходит четвёртый импульс, после сброса, на выводе «11» (выход out4) появляется напряжение уровня логической единицы которое подаётся на вывод «15» (RESET) — вывод сброса, от этого счётчик происходит сброс счётчика в исходное состояние когда напряжение уровня логической единицы будет на выводе «2» который соответствует выходу out0 (т.е. 0 импульсов пришло на тактовый вход). Если вывод «15» соединить с «землёй» (GND, минус ноль питания) а «14» при этом никуда не соединять то счётчик будет считать 7 импульсов, 8ой импульс произведёт сброс и счёт пойдёт заново (так можно сделать мигалку с 8 светодиодами). Если убрать мультивибратор и светодиоды то останется только микросхема 4022 и её можно использовать с программируемым устройством для управления шаговым двигателем подавая на тактовый вход этой микросхемы импульсы с программируемого устройства. Вместе с этим контроллером можно использовать например драйвер на эмиттерных повторителях на транзисторах такая схема универсальная, безопасная при неправильном управлении но у неё есть недостатки, можно также использовать микросхему драйвер если она подходит. Схема драйвера:
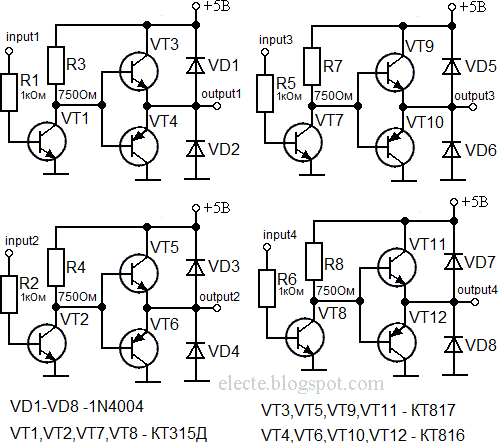

Для возможности реверса двигателя можно поставить переключатели (или переключатель) так чтобы при переключении менялись местами выводы output1 с output4 и output2 с output3 например:

Купить микросхему счётчик CD4022 dip корпус (как на видео выше) 5шт.
Таймер NE555 dip корпус 5шт.
КАРТА БЛОГА (содержание)