2. Аналого-цифровые и цифро-аналоговые преобразователи
Аналого-цифровой преобразователь– это устройстве, в котором осуществляются дискретизация и квантование и которое преобразует входной аналоговый сигнал в цифровой сигнал. Цифровой сигнал на выходе АЦП представлен, как правило, сигналами на шине данных.
На практике используется большое число различных типов AЦП, выполненных по разным схемам. Рассмотрим электрическая схему параллельного АЦП, часто используемого на практике (рис. 5.8).
С помощью одинаковых резисторов R1, R2 …RN создаются уровни квантования с шагом квантования, равным падению напряжения на одном резисторе. Шаг и уровни квантования зависят от значения опорного стабилизированного напряжения Е0.
Основная часть схемы АЦП – операционные усилители с резисторами и диодами. Эти усилители работают в качестве компараторов – устройств сравнения уровней двух сигналов.
Если напряжение входного сигнала на неинвертирующем входе превышает опорное напряжение на инвертирующем входе, то на выходе ОУ возникает большое поло
жительное напряжение, которое с помощью добавочного резистора и стабилитрона преобразуется в логическую единицу.
Если входной сигнал s(t) меньше опорного напряжения на инвертирующем входе, то на выходе операционного усилителя возникает отрицательное напряжение, которое с помощью открывающихся диодов Dl, D2, …, DN уменьшается практически до нуля и, тем самым, преобразуется в логический нуль.
Если входное напряжение s(t) равно нулю, то на выходах компараторов формируются логические нули. При плавном увеличении уровня входного сигнала компараторы будут последовательно, начиная с нижнего (см. рис. 5.8), срабатывать, выдавая на выходах логические единицы.
Шифратор CD осуществляет преобразование кода, поступающего с компараторов, в двоичный код шины данных Д. На шифратор АЦП поступает синхросигнал, и изменения на шине данных происходят только при появлении синхроимпульса. Частота синхросигнала в этом случае будет задавать частоту дискретизации.
При быстрых изменениях входного сигнала и при наличии временных задержек в операционных усилителях и других элементах схемы могут возникать сбои в работе АЦП, обусловленные появлением синхросигнала в момент изменения уровней на входах шифратора. На выходе АЦП в этом случае появляется неправильный код. Для устранения этого явления на входе АЦП включают дополнительное устройство выборки-хранения (рис. 5.9).
Устройство (рис. 5.9) включает электронный ключ на полевом транзисторе и накопительный конденсатор СХР. При подаче короткого положительного импульса на затвор транзистора он открывается (ключ замкнут), и напряжение на конденсаторе становится равным входному (режим выборки). После окончания действия импульса полевой транзистор закрывается, и напряжение на конденсаторе сохраняется неизменным (режим хранения). В этот отрезок времени напряжение y(t) поступает на схемы сравнения и после преобразования в виде логических уровней – на вход шифратора АЦП. Синхросигнал на шифратор подается после того, как на входах шифратора устанавливается соответствующая комбинация логических уровней.
Цифро-аналоговый преобразователь (ЦАП) – это устройство, преобразующее последовательность входных кодов в соответствующий непрерывный выходной сигнал.
Большинство ЦАП строятся с использованием цепочки R-2R. Электрическая схема цепочки приведена на рис. 5.10.
На входе цепочки подключается источник опорного напряжения. Несложный анализ схемы показывает, что напряжения в узлах цепочки a, b, m отличаются друг от друга в два раза. Например, напряжение в точке а равно Е0 /2, так как сопротивление всех элементов цепочки, включенных между этим узлом и корпусом, равно R. Учитывая, что сопротивление между узлом а и клеммой опорного источника тоже равно R, получим резистивный делитель напряжения два раза. Аналогично доказывается, что напряжение в точке b равно Е0 /4 и т.д. Чем дальше от источника расположены узлы в цепочке, тем меньше напряжение на них.
Сигнал на выходе трехразрядного ЦАП имеет вид (рис. 5.11). На вход ЦАП последовательно подаются следующие коды: 000,001,011, 010, 101, 001, 000. Выходное напряжение ЦАП имеет ступенчатый вид. Для уменьшения ступенек на выходе ЦАП обычно устанавливают фильтр низких частот.
Для высокоточной цифровой обработки сигналов в измерительной технике используются АЦП с большим числом уровней квантования. Такие АЦП трудно изготовить, используя параллельную схему, так как потребуется очень большое число компараторов. Например, для десятиразрядного АЦП потребуется более 1000 компараторов. В этом случае используются АЦП, выполненные по схеме поразрядного уравновешивания (рис. 5.12). Входной сигнал в этой схеме подается на неинвертирующий вход компаратора К. На другой вход компаратора, для сравнения, подается опорный сигнал с ЦАП.
Блок управления БУ вырабатывает двоичный выходной код у0, y1, …,уР-1, поступающий на вход ЦАП. Суть поразрядного уравновешивания заключается в следующем.
В начале цикла преобразования блок управления вырабатывает на выходе единицу только в старшем разряде. Этот код поступает на ЦАП, и на выходе ЦАП возникает напряжение, равное примерно половине максимально-допустимого входного напряжения. Если входное напряжение больше этого одного напряжения, то компаратор вырабатывает импульс, который поступает в блок управления БУ, и единица в старшем разряде фиксируется. Если входное напряжение меньше опорного, то единица в старшем разряде сбрасывается.
На втором этапе преобразования единица устанавливается в следующем разряде уР-2, и проводится сравнение входного напряжения с новым опорным напряжением, в результате которого фиксируется или сбрасывается единица в разряде уР-2.
Процесс сравнения продолжается до тех пор, пока не установятся все р разрядов на выходе блока управления. Очевидно, что АЦП с поразрядным уравновешиванием при прочих равных условиях работает примерно в р медленнее по сравнению с параллельным АЦП.
Аналого-цифровые и цифро-аналоговые преобразователи устанавливаются на входе и выходе устройства цифровой обработки сигналов. Центральное место в таких устройствах занимает ЭВМ и алгоритмы ее работы.
АЦП для систем сбора данных
Специально для систем сбора данных, которые работают с разнообразными источниками сигналов (датчиками), компания Maxim разработала микросхему MAX1329. MAX1329 выполнена на основе 12-битного АЦП (поддерживается возможность увеличения разрешения до 16 бит) и дополнена разнообразными аналоговыми и цифровыми блоками, которые превращают ее в однокристальную систему сбора данных, отвечающей требованиям портативных батарейных применений (миниатюрный 40-выводной корпус TQFN, 6×6 мм, питание 1,8…3,6 В, экономичные режимы работы, в т.ч. режим отключения с номинальным потреблением 0,5 мкА). К числу таких блоков относятся: два 12-битных ЦАП; раздельные ИОН АЦП и ЦАП; программируемый усилитель (Ку = 1,2,4,8); буфер FIFO (16 слов); 20-битный накопитель; 16-входовый дифференциальный мультиплексор на входе АЦП; твердотельные коммутаторы для конфигурации схемы; SPI/QSPI/MICROWIRE совместимый интерфейс для подключения к МК; генератор частоты 3,6864 МГц для синхронизации ИС; датчик температуры; емкостной преобразователь для питания аналогового тракта ИС; операционный усилитель и др. По сравнению с решением на основе МК со встроенным блоком АЦП, применение MAX1329 позволит избавиться от множества внешних компонентов, добиться большей гибкости конечного решения и полностью оправдать затраты на включение в проект отдельной ИС системы сбора данных. Микросхема рассчитана на работу в температурном диапазоне -40…85°C и является рекомендованной заменой для MAX1330 (последняя переведена в статус «не рекомендовано для новых разработок»). Пример использования MAX1329 иллюстрирует рис. 2.
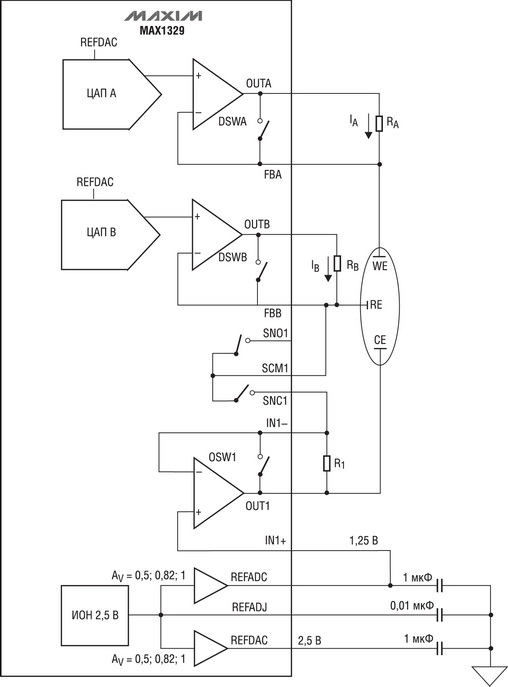
Рис. 2. Пример использования MAX1329 в трехпроводном потенциостате
Здесь показана упрощенная схема трехэлектродного потенциостата (находит применение в лабораториях электрохимических производств). ЦАП А используется для программируемого смещения рабочего электрода WE, а ЦАП В — для смещения опорного электрода RE. Оба смещения выполняются по отношению к счетному электроду CE и, таким образом, измерению подлежат два тока: IA и IB. С помощью резисторов RA и RB эти токи преобразуются в напряжения, которые в дальнейшем поступают на вход АЦП через внутренний мультиплексор (на схеме не показаны).
Прецизионные ацп цап преобразователи для управления компьютером
Цифро-аналоговые преобразователи преобразуют цифровой сигнал в аналоговый и используются для автоматизации технологических процессов, требующих аналогового управления.
- генератор колебаний произвольной формы;
- прецизионный источник напряжения;
- генератор тестовых сигналов;
- контроль и испытание цифровых устройств;
- системы автоматического управления на базе ПК;
- автоматические системы контроля и испытаний на базе ПК.
Аналого-цифровой преобразователь преобразует аналоговый сигнал в цифровой и используется сферах науки, производства, медицины и строительстве.
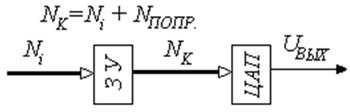
Способы идентификации и коррекции погрешностей ЦАП
Желательно, чтобы коррекция погрешностей производилось при изготовлении преобразователей (технологическая подгонка). Однако, часто она желательна и при использовании конкретного образца БИС в том или ином устройстве. В этом случае коррекция проводится введением в структуру устройства кроме БИС ЦАП дополнительных элементов. Такие методы получили название структурных.
Самым сложным процессом является обеспечение линейности, так как они определяются связанными параметрами многих элементов и узлов. Чаще всего осуществляют подгонку только смещения нуля, коэффициента
Точностные параметры, обеспечиваемые технологическими приемами, ухудшаются при воздействии на преобразователь различных дестабилизирующих факторов, в первую очередь – температуры. Необходимо помнить и о факторе старения элементов.
Погрешность смещения нуля и масштабная погрешность легко корректируются на выходе ЦАП. Для этого в выходной сигнал вводят постоянное смещение, компенсирующее смещение характеристики преобразователя. Необходимый масштаб преобразования устанавливают, либо корректируя коэффициент усиления, устанавливаемого на выходе преобразователя усилителя, либо подстраивая величину опорного напряжения, если ЦАП является умножающим.
Компенсационные методы заключаются во введении в структуру преобразователя вспомогательных резистивных матриц, управляемых кодом, обратным коду, подаваемому на основную матрицу. Это позволяет уменьшить паразитное влияние кодозависимых токов, протекающих по общим шинам земли и питания, стабилизирует рассеиваемую мощность и тепловой режим схемы.
Методы коррекции с тестовым контролем заключаются в идентификации погрешностей ЦАП на всем множестве допустимых входных воздействий и добавлением, рассчитанных на основе этого поправок, к входной или выходной величине для компенсации этих погрешностей.
При любом методе коррекции с контролем по тестовому сигналу предусматриваются следующие действия:
1. Измерение характеристики ЦАП на достаточном для идентификации погрешностей множестве тестовых воздействий.
2. Идентификация погрешностей вычислением их отклонений по результатам измерений.
3. Вычисление корректирующих поправок для преобразуемых величин или требуемых корректирующих воздействий на корректируемые блоки.
4. Проведение коррекции.
Контроль может проводиться один раз перед установкой преобразователя в устройство с помощью специального лабораторного измерительного оборудования. Может проводиться и с помощью специализированного оборудования встроенного в устройство. При этом контроль, как правило, проводится периодически, все то время пока преобразователь не участвует непосредственно в работе устройства. Такая организация контроля и коррекции преобразователей может осуществляться при его работе в составе микропроцессорной измерительной системы.
Основной недостаток любого метода сквозного контроля – большое время контроля наряду с разнородностью и большим объемом используемой аппаратуры.
Определенные тем или иным способом величины поправок хранятся, как правило, в цифровой форме. Коррекция же погрешностей с учетом этих поправок может проводиться как в аналоговой, так и цифровой форме.
При цифровой коррекции поправки добавляются с учетом их знака к входному коду ЦАП. В результате на вход ЦАП поступает код, при котором на его выходе формируется требуемое значение напряжения или тока. Наиболее простая реализация такого способа коррекции состоит из корректируемого ЦАП, на входе которого установлено цифровое запоминающее устройство (ЗУ). Входной код играет роль адресного. В ЗУ по соответствующим адресам занесены, заранее рассчитанные с учетом поправок, значения кодов, подаваемые на корректируемый ЦАП.
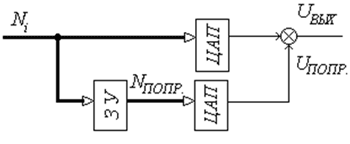
При аналоговой коррекции кроме основного ЦАП используется еще один дополнительный ЦАП. Диапазон его выходного сигнала соответствует максимальной величине погрешности корректируемого ЦАП. Входной код одновременно поступает на входы корректируемого ЦАП и на адресные входы ЗУ поправок. Из ЗУ поправок выбирается соответствующая данному значению входного кода поправка. Код поправки преобразуется в пропорциональный ему сигнал, который суммируется с выходным сигналом корректируемого ЦАП. Ввиду малости требуемого диапазона выходного сигнала дополнительного ЦАП по сравнению с диапазоном выходного сигнала корректируемого ЦАП собственными погрешностями первого пренебрегают.
В ряде случаев возникает необходимость проведения коррекции динамики работы ЦАП.
Переходная характеристика ЦАП при смене различных кодовых комбинаций будет различной, иными словами – различным будет время установления выходного сигнала. Поэтому при использовании ЦАП необходимо учитывать максимальное время установления. Однако в ряде случаев удается корректировать поведение передаточной характеристики.
Использование импульсного преобразователя для питания прецизионного АЦП последовательных приближений в микромощных приложениях. Часть 1
Расширение области использования высокоточных измерений требует все более и более высокой энергоэффективности источников питания. Это особенно актуально в связи с наступлением Интернета вещей, стимулирующего рост потребностей в беспроводных сенсорных измерительных узлах, носимых устройствах с автономным питанием для фитнеса и медицины и промышленных системах обработки сигналов, в которых используется изолированное питание, или питание, получаемое по петле 4-20 мА. В таких приложениях увеличение КПД мощности означает большее время жизни батарей, снижение периодичности обслуживания и упрощение конструкции источника питания.

Как правило, в точных измерительных системах для управления напряжением малошумящих шин питания прецизионных АЦП используются стабилизаторы с низким падением напряжения (LDO). Однако LDO стабилизаторы могут быть очень неэффективными, и нередко бóльшая часть мощности рассевается ими в виде тепла. В этой статье обсуждаются способы достижения более высоких значений КПД источников питания прецизионных АЦП последовательных приближений. Будет рассмотрено использование ультра-малопотребляющего импульсного стабилизатора, работающего в гистерезисном режиме, включая средства интеллектуального управления стабилизатором, синхронизированным с АЦП для улучшения шумовых характеристик, а также проанализированы компромиссы между потребляемой мощностью и уровнем шумов.
В диапазоне средних и больших нагрузок (от сотен миллиампер до единиц ампер) импульсные регуляторы с фиксированной частотой переключения или с широтно-импульсной модуляцией (ШИМ) обеспечивают очень высокий КПД, часто превышающий 90%. Однако такой КПД достигается ценой пульсаций переключения, проявляющихся на фиксированной частоте от сотен килогерц до нескольких мегагерц. Как видно из Рисунка 1, коэффициент подавления пульсаций питания (power supply rejection ratio – PSRR) типичного АЦП последовательных приближений остается очень хорошим на низких частотах вплоть до 100 кГц, после чего начинает быстро падать.
| Рисунок 1. | Частотная зависимость коэффициента подавления пульсаций питания АЦП последовательных приближений. |
Типичные значения токов, потребляемых линиями питания VDD высокоточных АЦП последовательных приближений, находятся в пределах от нескольких миллиампер до микроампер, если АЦП работает в режиме пониженной скорости преобразования, так что с точки зрения КПД нет никаких преимуществ в использовании преобразователя с фиксированной частотой переключения вместо LDO стабилизатора.
Однако высокоэффективные сверхмаломощные импульсные понижающие преобразователи могут работать в гистерезисном режиме с очень низким собственным током потребления.
В гистерезисном режиме регулятор, поддерживая постоянство пикового тока индуктивности, заряжает импульсами ШИМ выходной конденсатор до напряжения, немного превышающего номинальное. Когда выходное напряжение увеличивается до значения, при котором измеренный выходной сигнал превышает верхний порог гистерезиса, регулятор переходит в режим ожидания. В режиме ожидания MOSFET верхнего и нижнего плеча, а также большинство схем отключаются для снижения тока потребления и, соответственно, для увеличения КПД (Рисунке 2). Во время ожидания выходной конденсатор отдает энергию в нагрузку, и выходное напряжение снижается до тех пор, пока не станет меньше нижнего порога гистерезисного компаратора. Регулятор просыпается и возобновляет генерацию импульсов ШИМ, чтобы опять зарядить выходной конденсатор.
| Рисунок 2. | Зависимость КПД от тока нагрузки для режима ШИМ (вверху) и гистерезисного режима (внизу). |
В гистерезисном режиме частота пульсаций переключения является функцией выходного тока и параметров LC-цепи, и для нагрузок в несколько миллиампер находится в диапазоне единиц килогерц. На частотах в несколько килогерц прецизионный АЦП имеет очень хороший PSRR, который отлично выполняет функцию подавления/ослабления пульсаций переключения на выходе.
| Рисунок 3. | Схема включения AD7980 и ADP5300. |
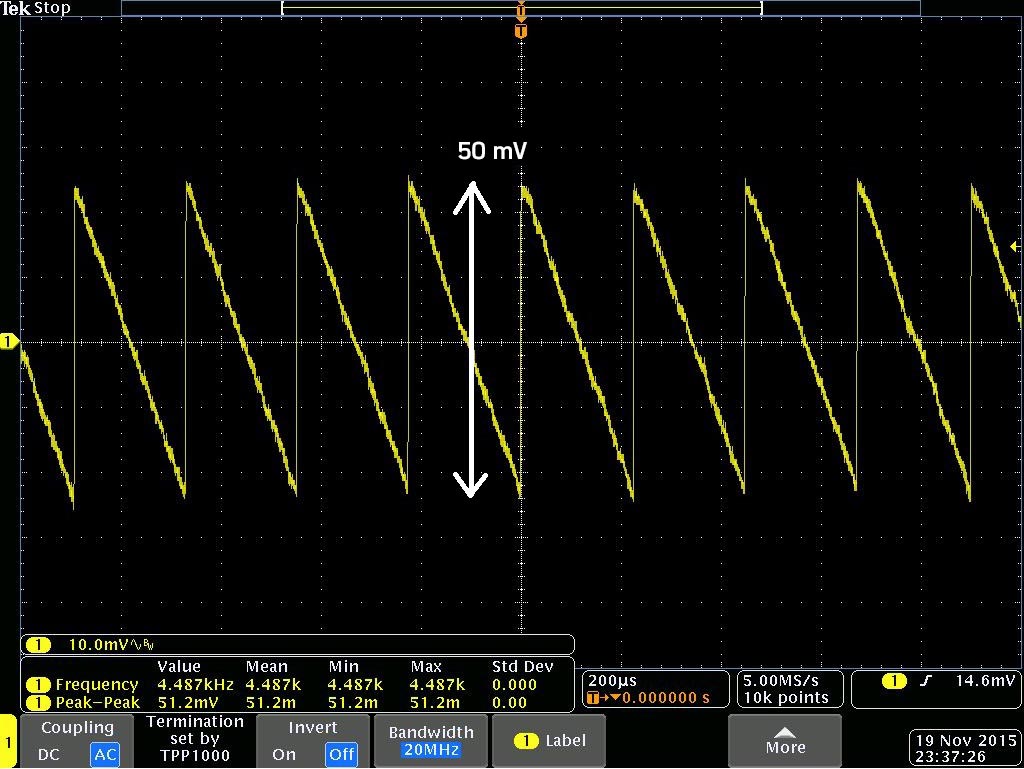
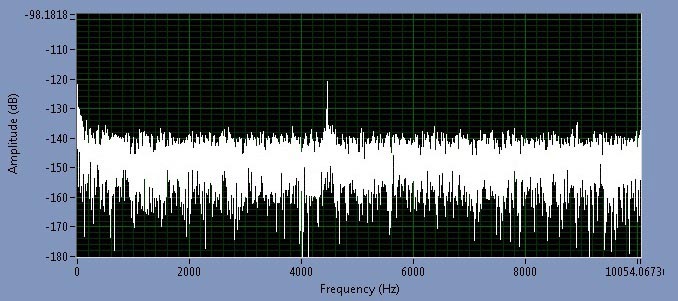
Для примера рассмотрим схему на Рисунке 3, в которой использован АЦП AD7980. Типовой ток, потребляемый этой микросхемой по выводу VDD, равен 1.5 мА при частоте выборки 1 Мвыб/с, и пропорционально увеличивается по мере роста частоты. Как можно видеть из Рисунка 4, в схеме преобразования напряжения шины 5 В в 2.5 В частота пульсаций переключения равна 4.5 кГц, а их амплитуда составляет 50 мВ пик-пик. Эти пульсации ослабляются АЦП до уровня, определяемого значением его PSRR. БПФ выходного сигнала АЦП показывает пик с уровнем –120 dBFS (дБ полной шкалы) на частоте 4.5 кГц. При входном диапазоне АЦП, равном 5 В, величина этого пика равна
Такой уровень пульсаций на выходе АЦП чрезвычайно мал для 16-битного преобразователя; 5 мкВ пик-пик здесь соответствуют 0.07 от уровня младшего разряда. Пульсации столь низкого уровня неразличимы на фоне собственных шумов АЦП, их обнаружение требует большого количества усреднений, и во многих приложениях они будут просто не видны. Пересчет этих выходных пульсаций в PSRR дает
 |
||
 |
||
| Рисунок 4. | Пульсации переключения гистерезисного преобразователя ADP5300 (без постоянной составляющей) при питании AD7980 и спектр выходного сигнала АЦП при частоте выборки 1 Мвыб/с. |
|
Полученное значение не сильно отличается от величины, которую можно получить из графика для PSRR АЦП AD7980 на Рисунке 1: примерно 77 дБ на частоте 4.5 кГц.