Скачать программное обеспечение LEGO Education. Программы для ЛЕГО.
Mindstorms EV3 К ЗАГРУЗКАМ

SPIKE™ Prime К ЗАГРУЗКАМ

WeDo 2.0 К ЗАГРУЗКАМ
Машины и механизмы К ЗАГРУЗКАМ
Как установить программу?

Если вы используете операционную систему Windows 7 или Windows 10, проблем с установкой Скретч возникнуть не должно. Просто скачайте и запустите установщик. Появится окно, в котором можно выбрать путь к директории установки, нажав иконку папки.
После выбора пути, нажмите кнопку «Продолжить», программа установиться автоматически. По окончанию установки создастся ярлык на рабочем столе и произойдет первый запуск приложения.
Внимание!: для установки программы на компьютере должен быть установлен adobe air.
OROCOS
OROCOS (Open Robot Control Software project) — открытое программное обеспечение для управления роботами.
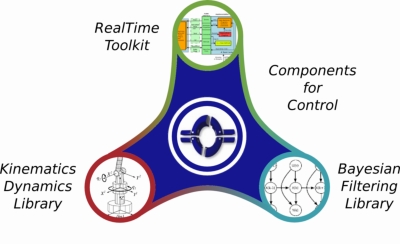
Проект OROCOS поддерживает следующие направления четырёх C++ библиотек:
1. The Real-Time Toolkit,
2. The Kinematics and Dynamics Library,
3. The Bayesian Filtering Library
4. The Orocos Component Library.
Так как OROCOS — это просто набор библиотек, то как следствие у OROCOS отсутствуют новомодные графические инструменты разработки и собственный симулятор.
* The Orocos Real-Time Toolkit (RTT) не существует сам по себе, но обеспечивает инфраструктуру и функциональность других приложений. Данная библиотекя акцентируется на приложениях реального времени, позволяющих интерактивно управлять модулями системы.
* The Orocos Components Library (OCL) предоставляет готовые к использованию компоненты управления, а также компоненты для управления и доступа к аппаратным средствам.
* The Orocos Kinematics and Dynamics Library (KDL) является частью программ, разработанных на C++ ,которая, в свою очередь, позволяет позволяет вычислять кинематику в реальном времени
* Библиотека Orocos Bayesian Filtering Library (BFL) обеспечивает независимую структуру (framework) для Dynamic Bayesian Networks, то есть, рекурсивную обработку информации в соответствии с алгоритмами оценки, применяемых в Bayes’ rule , такие как (Extended) Kalman Filters, Particle Filters (Sequential Monte methods).
Не так давно проект OROCOS стал доступен в виде стека под ROS
orocos_toolchain_ros
Плюсы: бесплатный + open source + Real-Time.
Цикл с условием
Вернемся к физкультуре и изменим задачу. Ведь кто-то может и не сделать 7 приседаний, а другой способен сделать 27. Можно ли учесть это при создании цикла? Конечно. Только теперь мы будем использовать не счетчик (количество повторений), а условие. К примеру, пока не устал, делай приседания. В этом случае человек будет делать не конкретное число приседаний, а приседать до тех пор, пока не устанет. И наш цикл на абстрактном языке примет такой вид:
пока не устал
Слова не устал в нашем случае — это условие. Когда оно истинно, цикл выполняется. Если же оно ложно (устал) тело цикла не будет выполнено. У исполнителя Робот есть несколько условий
сверху свободно
снизу свободно
слева свободно
справа свободно
сверху стена
снизу стена
слева стена
справа стена
Теперь давайте решим следующую задачу для Робота — нарисовать вертикальную линию от левой до правой границы поля использую цикл с условием. Изначально Робот находится в левом верхнем углу.
Давайте сначала сформулируем словесный алгоритм — т. е. опишем словами что нужно делать Роботу. Этот алгоритм будет звучать примерно так:
«Пока справа свободно делай шаг вправо и закрашивай клетку»
В результате Робот пробежит по всем клеткам вправо и будет их закрашивать до тех пор, пока справа не окажется стена.
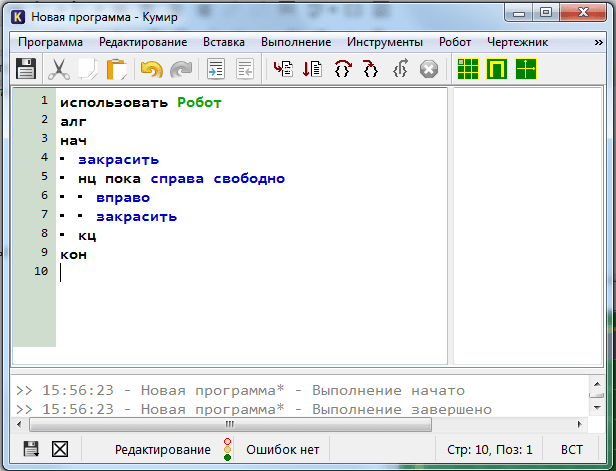
Исходный код нашей программы для Робота будет примерно такой:
использовать Робот
нц пока справа свободно
В результате выполнения этой программы мы увидим вот такую картину:
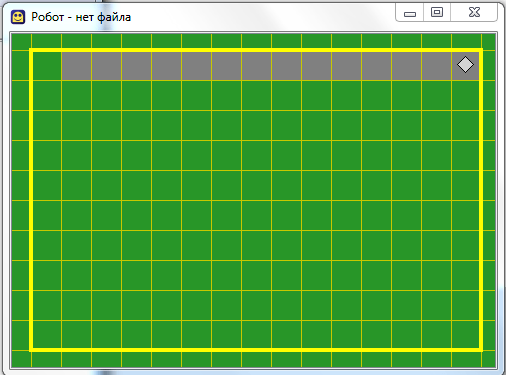
Как видим, не хватает только закрашенной первой клетки. Для этого перед циклом необходимо выполнить команду закрасить.
Для закрепления прошу написать программу, которая будет делать рамку вокруг рабочего поля Робота независимо от его размера. Конечно же с использованием циклов с условием. В итоге должно получиться так:
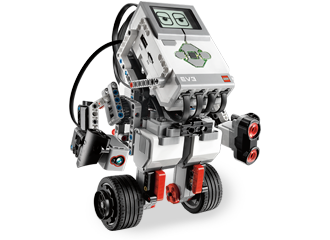
Приложение Lego Mindstorms EV3
Это приложение предлагает нам преимущество в силе , интерактивно создавайте, программируйте и управляйте роботами EV3 умным, увлекательным и быстрым способом, используя только наш стол или компьютер, без утомительной необходимости использовать кабель или сложное дополнительное программное обеспечение. .

Следует отметить, что каждый из блоки (кирпич) заставляет робота реагировать определенным образом, что комбинированная комбинация позволит роботу ходить, общаться, хватать и т. д.
Советы перед программированием и управлением роботом LEGO с помощью приложения Lego Mindstorms EV3
Чтобы начать программировать робот LEGO без осложнений с приложением Lego Mindstorms EV3, вам нужно будет следовать следующим советам:
- Отметьте доску и все элементы, из которых она состоит.
- Затем она распределяет каждую маленькую деталь на своей красной сортировочной доске.
- Затем поищите краткие инструкции о том, как должен выглядеть каждый из кусочков, вы найдете его на этикетке на крышке.
- Разложите все более крупные части в части, которая находится под сортировочной доской; Эти части обычно: Блок EV3 , кабели, зарядные устройства, аккумулятор, датчики и инструкция, в лотке найдется место для крупных предметов.
Управление моторами в leJOS EV3
leJOS EV3 поддерживает не только моторы EV3, но и моторы NXT, RCX, PF и Tetrix. Моторы EV3 и NXT могут быть подключены обычным проводом, а для подключения остальных моторов требуются специальные провода и адаптеры.
У всех перечисленных моторов разные возможности. В моторы EV3 и NXT встроены энкодеры сообщающие модулю EV3, как вращается мотор. Такие моторы называются регулируемыми. Регулируемые моторы самостоятельно контролируют скорость вращения и могут повернуться на заданный угол.
Нерегулируемыми моторами (без энкодера), такими как PF и RCX, можно управлять только самым простым способом: задать напряжение и направление вращения и через некоторое время остановить их. Для некоторых проектов это может быть полезным. leJOS позволяет работать с моторами EV3 и NXT как с нерегулируемыми.
PF моторы можно сделать регулируемыми, если подключить их через контроллер Mindsensors GlideWheel-M.
Итак, давайте посмотрим, как управлять моторами в leJOS. Для начала нужно создать соответствующий класс и указать порт. Для регулируемых моторов есть следующие классы:
-
-
-
- EV3LargeRegulatedMotor — для большого мотора EV3;
- EV3MediumRegulatedMotor — для среднего мотора EV3;
- NXTRegulatedMotor — для мотора NXT;
- MindsensorsGlideWheelMRegulatedMotor — для мотора PF подключенного через контроллер Mindsensors GlideWheel-M;
- TetrixRegultedMotor — для мотора Tetrix.
Порты обозначаются следующим образом: MotorPort.A, MotorPort.B, MotorPort.C и MotorPort.D.
Вот так будет выглядеть создание класса для управления большим мотором EV3, подключенным к порту A:
Затем, чтобы повернуть мотор на 360 градусов, нужно сделать следующее:
С регулируемыми моторами вы можете использовать следующие функции (полное описание всех функций можно найти здесь):
-
-
-
- forward() – двигаться вперёд до получения команды стоп (или её эквивалента);
- backwards() – двигаться назад до получения команды стоп (или её эквивалента);
- stop() – остановить мотор;
- flt() – остановить мотор без торможения;
- setSpeed(int speed) – установить скорость;
- rotate(int angle) – повернуть на угол (угол может быть положительным или отрицательным в градусах);
- rotateTo(int angle) – повернуть мотор до угла (в градусах).
Для синхронизации двух моторов нужно использовать функции synchronizeWith, startSynchronization и endSynchronization. Ниже пример кода для синхронного поворота двух двигателей на 360 градусов:
А вот пример синхронного запуска и остановки двух двигателей:
Если вы хотите использовать нерегулируемые моторы, то при использовании мотора с энкодером вам нужно использовать классы реализующие интерфейс EncoderMotor, а, если мотор без энкодера, то классы реализующие интерфейс DCMotor. Вот эти классы:
Вот пример управления мотором EV3 или NXT как нерегулируемым:
А, если вы подключите с помощью специального кабеля мотор RCX , то управлять вы им сможете вот так:
Блоки
Группы блоков
Все блоки размещены в фабрике блоков в группах:
Группа блоков Описание Управление Блоки, ответственные за ход выполнения программы, ее ветвления
Например, циклы, условия, задержки, переходы.Порты Блоки для прямого доступа к портам IN и OUT: установка высокого или низкого напряжения, чтение. Логика Всевозможные логические операторы: сравнение, И, ИЛИ, НЕ и т.д. Все эти блоки возвращают либо 1, либо 0 Математика Различные математические операторы: сложение, вычитание, умножение, масштабирование и т.д. Переменные Блоки для создания переменных различного типа и их изменения Моторы Блоки для управления моторами и серводвигателями Датчики Блоки для настройки и получения данных с датчиков: расстояния, цвета, ИК, освещенности, кнопки, огня, удара, энкодера, микрофона, магнитного поля, положения, температуры. Встроенные кнопки Блоки для опроса состояния кнопок, расположенных на плате Исполнители Блоки для управления различными исполнительными устройствами (кроме двигателей): светодиодом, зуммером Встроенный RGB LED Блок для управления трехцветным светодиодом, расположенным на плате ИК ПДУ Блоки для реализации дистанционного управления с помощью инфракрасного пульта Bluetooth ПДУ Блоки для реализации дистанционного управления по протоколу Bluetooth с помощью приложения Роботрек ПДУ Дисплей Блоки для работы с дисплеем — вывода текста, рисования геометрических фигур и т.д. Отладка Блоки для работы с UART — оправка данных на компьютер и чтение данных, отправляемых с компьютера через терминал I2C Общие блоки для работы с устройствами, работающими на шине I2C Память Блоки для работы с постоянной памятью: чтение и запись в EEPROM (память микроконтроллера) и на SD-карту Свой код Блоки для добавления в визуальную программу любых строк текстового кода. Порты Arduino Блоки для доступа к портам интерфейса Arduino Виды блоков
Блоки можно разделить на виды по нескольким параметрам
Команды
Команды — блоки, выполняющие какое-то действие, но не возвращающие никакого результата. Любая программа должна состоять хотя бы из одной команды. Команды имеют коннекторы сверху и снизу и соединяются только друг с другом.
Команды могут принимать результаты функций или переменные в качестве аргументов.
Команды, требующие аргументов, имеют один или несколько коннекторов с правой стороны. Форма коннектора указывает на тип принимаемого в качестве аргумента значения, к этому коннектору присоединяется либо переменная соответствующего типа, либо функция.
Команды выполняются друг за другом сверху вниз.


Функции
Функции не имеют коннекторов сверху и снизу и могут использоваться только в качестве аргументов каких-либо команд или других функций. Тип возвращаемых данных соответствует форме левого коннектора блока:
Форма левого коннектора блока Тип данных Округлая 
Boolean. Логический 0 или 1. Угловая 
Число Прямоугольная 
Строка из символов Фигурная 
Символ 
Функции могут «вкладываться» друг в друга сколько угодно раз. При этом выполнение функций выполняется всегда начиная с самого глубоко вложенного блока, например:
В данной программе:
Редактируемые и нередактируемые блоки
Как команды, так и функции могут иметь редактируемые элементы: либо выбор из списка, либо ввод своего текста. Например:
Инструменты страницы
За исключением случаев, когда указано иное, содержимое этой вики предоставляется на условиях следующей лицензии: CC Attribution 3.0 Unported
Apitor Robot для ПК Скриншоты


Проверить совместимые приложения для ПК или альтернативы
заявка Скачать Рейтинг Разработчик  apitor robot
apitor robotПолучить приложение или альтернативы 3.88571/5
35 рецензияИли следуйте инструкциям ниже для использования на ПК
Выберите версию для ПК:
Если вы хотите установить и использовать Apitor Robot на вашем ПК или Mac, вам нужно будет загрузить и установить эмулятор Desktop App для своего компьютера. Мы усердно работали, чтобы помочь вам понять, как использовать app для вашего компьютера в 4 простых шагах ниже:
NinjaTrader

Ninja Trader — многофункциональная программа, которая может использоваться как для чартинга и технического анализа, так и в качестве полноценной торговой платформы для торговли фьючерсными контрактами, акциями и также валютами на FOREX. Пригодна для разработки торговой системы (наличие языка программирования, возможность выполнения скриптов — весь набор для создания собственной ТС) и может работать как тренажер трейдера. В ней подспорье для программистов — открытые интерфейсы COM, DLL, .NET; поэтому существуют расширения (плагины) под NinjaTrader, предоставляющие инвесторам новый функционал.
Вы уже сейчас можете начать изучать Видео курс- роботы в TSLab и научиться самому делать любых роботов!
Также можете научиться программировать роботов на нашем Видео курсе «Роботы для QUIK на языке Lua»
Если же вам не хочется тратить время на обучение, то вы просто можете выбрать уже готовые роботы из тех, что представлены у нас ДЛЯ TSLab, ДЛЯ QUIK, ДЛЯ MT5, ДЛЯ КРИПТОВАЛЮТЫ!
Также можете посмотреть совершенно бесплатные наработки для МТ4, Квика, МТ5. Данный раздел также постоянно пополняется.
Не откладывайте свой шанс заработать на бирже уже сегодня!
-
-
-
-











