Привет студент
Все летательные аппараты в настоящее время имеют комплекс необходимого приборного оборудования, обеспечивающего экипажу выполнение полета, контроль за работой силовых установок и других систем. Приборы позволяют летчику производить контроль взлета и посадки, снижения и набора высоты, различных эволюций при выполнении полета. Даже самые первые самолеты имели на борту указатели скорости, высотомеры и компасы. Без приборов фактически невозможен полет любого летательного аппарата.
Авиационные приборы, устанавливаемые на борту самолета, классифицируются по назначению и принципу действия.
В зависимости от назначения они подразделяются на следующие группы:
пилотажно-навигационные (включая пилотажно-навигационные системы);
приборы контроля работы авиадвигателей; впомогательные приборы.
Первая группа приборов включает в себя указатели скорости, вариометры, авиагоризонты, компасы, указатели поворота и скольжения, автопилоты и др.
К приборам контроля работы двигателей относятся: тахометры, манометры, термометры, топливомеры, масломеры, расходомеры.
Вспомогательная группа приборов включает в себя те приборы, которые не вошли в основные группы (амперметры, вольтметры, манометры гидросистем, кабинные термометры и т. д.).
Указатель скорости предназначен для определения скорости полета и основан на принципе измерения скоростного напора воздушного потока. Действительно, зная величину скоростного напора
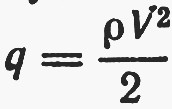
и плотность воздуха ρ, можно определить скорость самолета относительно воздуха. Схема указателя скорости показана на рис. 122.
Датчиком указателя скорости является приемник воздушных давлений (ПВД), устанавливаемый по направлению полета самолета. Приемник воздушных давлений имеет статическую камеру (С), сообщаемую с атмосферой через ряд отверстий, и камеру полного давления (П). Давление в статической камере всегда равно атмосферному. Благодаря осевому направлению отверстия в носке ПВД камера полного давления воспринимает не только атмосферное давление, но и скоростной напор. Полное давление будет зависеть от скорости движения самолетов относительно воздуха.
Давление из обеих камер через трубопроводы подается к указателю скорости, чувствительным элементом которого является манометрическая коробка. В герметичную внутреннюю полость корпуса указателя скорости подводится давление из статической камеры ПВД. В полость манометрической коробки поступает полное давление из камеры Я приемника воздушных давлений. Таким образом, манометрическая коробка оказывается под действием перепада полного и статического давлений, т. е. под действием скоростного напора.
Вследствие перепада давлений манометрическая коробка расширится и перемещение ее жесткого центра через передаточный механизм передается на стрелку прибора. Степень расширения манометрической коробки зависит от скорости полета.
При малых скоростях полета чувствительность манометрической коробки незначительная и, следовательно, перемещения жесткого центра небольшие. Для более точного определения воздушной скорости при полете на малых скоростях, что особенно важно при полете на критических и посадочных скоростях, в указателях скорости применяют трехмембранные манометрические коробки. Средняя и нижняя мембраны при этом составляют герметичную полость, сообщаемую с камерой полного давления, а через верхнюю мембрану свободно передается перемещение жесткого центра средней мембраны. Благодаря такому устройству на малых скоростях скоростной напор воспринимается средней и нижней мембранами. Вследствие малой жесткости средней мембраны перемещения жесткого центра будут большими даже при наличии незначительного скоростного напора. Поэтому деления шкалы указателя скорости выполняются редкими и позволяют с достаточной точностью определить воздушную скорость. С увеличением скорости полета средняя мембрана прижимается к верхней, в результате чего суммарная их жесткость возрастет, и скоростному напору необходимо преодолеть гораздо большее сопротивление.
При определении воздушной скорости по величине скоростного напора указатель скорости тарируется с учетом постоянной плотности воздуха. Однако плотность в большой мере зависит от температуры и давления (высоты полета). Следовательно, данному прибору всегда присущи погрешности, связанные с несовершенством методики замера скорости. Данные погрешности учитываются при подсчете истинной воздушной скорости на навигационной линейке.
На большинстве современных самолетов, помимо обычного указателя скорости, устанавливается указатель числа М (маметр) с контактным устройством системы световой сигнализации, замыкающим электрическую цепь в момент достижения самолетом скорости соответствующей установленному предельному значению числа М. Принцип действия прибора основан также на замере разности между полным и статическим давлением в полете.
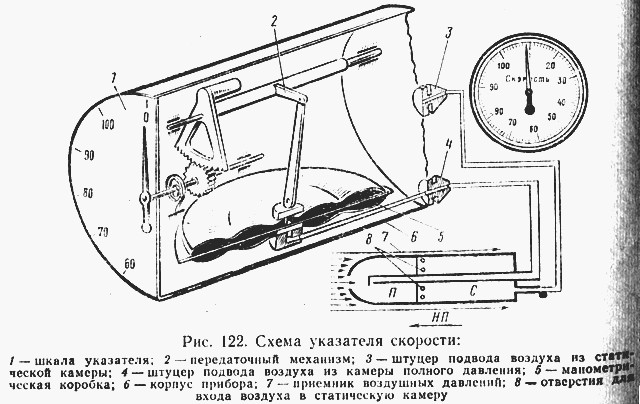
Вариометр (рис. 123) устанавливается на самолете для определения вертикальной скорости его движения, что позволяет пилоту строго выдерживать заданную высоту полета.
Измерение вертикальной скорости движения самолета вариометром основано на принципе замера перепада между атмосферным давлением и давлением внутри замкнутого объема корпуса прибора, сообщающегося с атмосферой через капилляр.
В качестве чувствительного элемента в вариометре используется манометрическая коробка, непосредственно сообщаемая с атмосферой. Такая связь с атмосферой чувствительного элемента и корпуса прибора при изменении атмосферного давления (высоты полета) приводит к тому, что внутри манометрической коробки давление меняется сразу, а в полости корпуса — постепенно. В peзультате этого образуется перепад между давлением внутри и вне мембранной коробки. Если, например, самолет будет идти с набором высоты (атмосферное давление будет понижаться), то в полости манометрической коробки давление сразу же уменьшится, а в полости корпуса прибора оно будет падать постепенно. Вследствие образовавшегося перепада давления манометрическая коробка сожмется и движение ее центра передастся передаточному механизму, который переместит стрелку указателя вверх, что будет свидетельствовать о подъеме самолета. Шкала указателя градуируется в метрах в секунду. При снижении самолета стрелка указателя отклоняется вниз, а в горизонтальном полете стрелка находится на нуле.
На лицевой части вариометра имеется юстировочный винт, с помощью которого стрелку прибора при случайном ее смещении можно всегда установить на нуль.
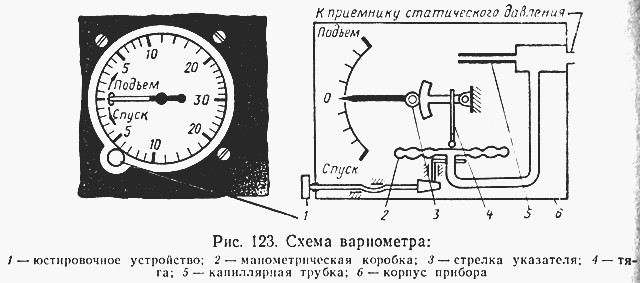
Барометрический высотомер служит для определения высоты полета самолета по величине абсолютного давления окружающего воздуха, изменяющегося с высотой.
Чувствительным элементом высотомера (рис. 124) являются анероидные коробки, жестко скрепленные друг с другом. С увеличением высоты полета окружающее атмосферное давление воздуха падает и анероидные коробки расширяются. Перемещение центра коробок при этом через передаточный механизм передается на стрелки, которые отклоняются, показывая увеличение высоты полета. Шкала прибора градуируется в метрах. Обычно высотомеры имеют две стрелки, одна из которых (большая) делает полный оборот при подъеме на каждые 1 000 м высоты, а другая (малая) — на каждые 10 000 м. Такое устройство позволяет более точно определять высоту полета.
В приборе предусматривается специальный компенсатор (биметаллический) температурных ошибок и пружинный противовес для компенсации возможных ошибок из-за действия инерционных сил. В связи с тем что фактическое состояние атмосферы на аэродроме может отличаться от расчетного (по международной стандартной атмосфере), высотомеры при стоянке самолетов в разное время будут показывать различную высоту. Для устранения сопутствующих этому явлению ошибок на лицевой стороне прибора имеется барометрическая шкала, связанная со стрелками и кремальерой. Поворотом кремальеры стрелки высотомера можно установить в нулевое положение.
Компасы, устанавливаемые на самолетах, служат для определения его курса. В качестве указателя курса широкое распространение получили магнитные компасы, использующие в своей основе явление земного магнетизма. Магнитным компасам всегда присущи ошибки, связанные, например, с инерционностью вращающихся масс, девиацией магнитной стрелки. Девиация, т. е. отклонение магнитной стрелки на некоторый угол от истинного направления магнитных силовых линий земли, является результатом воздействия на стрелку компаса посторонних магнитных полей. На самолете девиация вызывается стальными деталями самолета, электромагнитными полями генераторов, электрических приборов и т. д.
Для устранения девиации магнитную систему компаса обычно относят в такое место самолета, где посторонние магнитные поля незначительны. Такие компасы получили название дистанционных.
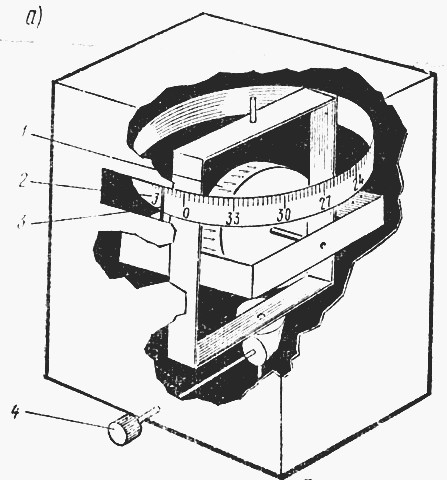
Однако указанные ошибки магнитных компасов делают их непригодными при разворотах самолета на заданный угол и для строгого выдерживания курса. В этом отношении наибольшую точность показаний имеют гирополукомпасы (рис. 125), использующие в своей работе свойство гироскопа с тремя степенями свободы сохранять неизменным положение оси ротора в пространстве. Для определения курса самолета к внешней рамке гироскопа, расположенного внутри корпуса прибора, крепится картушка с оцифровкой от 0 до 360°. Ось ротора гироскопа устанавливается параллельно продольной оси самолета (рис. 125, б). Если самолет повернется на некоторый угол, то точно на такой же угол повернется продольная ось самолета и корпус прибора с окошечком и курсовой чертой (рис. 125, в). Ось же ротора гироскопа благодаря своим свойствам сохранит прежнее направление. Картушка, прикрепленная к рамке гироскопа, также сохранит свое первоначальное положение. Следовательно, курсовая черта относительно картушки повернется на угол, равный углу поворота самолета, что и будет видно в смотровом окошечке гирополукомпаса. На лицевой стороне прибора имеется арретирующее устройство, позволяющее поворачивать весь гироскоп относительно вертикальной оси и тем самым согласовывать показания гирополукомпаса с магнитным компасом.
Авиагоризонт предназначен для определения положения самолета относительно плоскости горизонта.
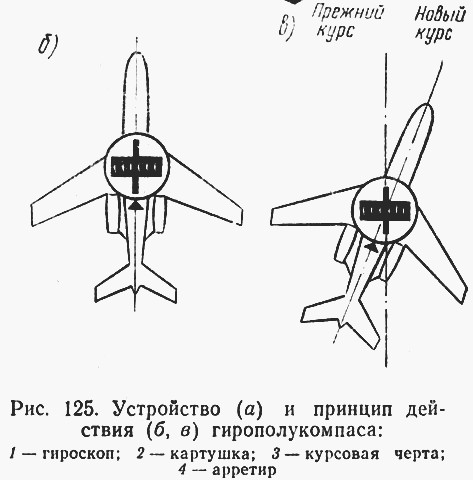
Принцип работы авиагоризонта также основам на использовании свойства гироскопа с тремя степенями свободы сохранять неизменным положение оси ротора в пространстве. В авиагоризонте (рис. 126) в отличие от гирополукомпаса гироскоп устанавливается таким образом, что ось ротора при любых положениях самолета в пространстве остается вертикальной.
С внешней рамкой гироскопа через передачу из двух маленьких с одинаковым числом зубьев шестеренок связан индекс прибора (силуэт самолета). На смотровом окошечке лицевой стороны прибора нанесены горизонтальные черточки-индексы.
В горизонтальном полете силуэт самолетика находится на одной линии с горизонтальными индексами.
Если самолет начнет снижаться, то при этом корпус прибора повернется вокруг оси II—II гироскопа, который сохранит свое первоначальное положение. Горизонтальные индексы относительно силуэта самолетика сместятся вверх, и у пилота создастся иллюзия снижения самолета. При наборе высоты получается обратная картина.
При помощи авиагоризонта определяют и крен самолета. При крене на определенный угол наружная рамка гироскопа поворачивается вместе с корпусом прибора относительно оси I — I , оставаясь на одном уровне с горизонтальными индексами. Подвижная шестеренка, сидящая на одной оси с силуэтом самолетика, повернется относительно жестко закрепленной с внешней рамкой гироскопа шестеренки на угол, вдвое превышающий угол крена самолета, т. е. относительно горизонтальных индексов силуэт самолетика накренится на угол, равный поперечному крену самолета.
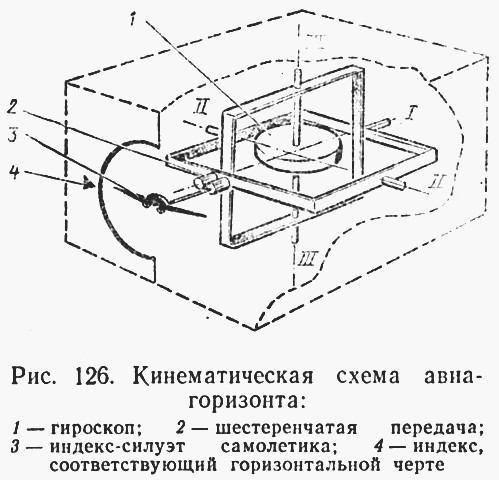
Указатель поворота (рис. 127) в своей работе использует свойство гироскопа с двумя степенями свободы, который в случае пово-
рота самолета с какой-то угловой скоростью стремится повернуться относительно оси вращения рамки X—X таким образом, чтобы вектор угловой скорости собственного вращения ротора был бы параллелен вектору угловой скорости самолета. Угол поворота фиксируется стрелкой, выведенной на лицевую часть прибора. По окончании разворота гироскопический момент будет равен нулю и стрелка под действием пружины возвратится в нейтральное положение. Для устранения колебаний стрелки при резких изменениях угловой скорости в приборе имеется демпфер (успокоитель).
Обычно указатель поворота совмещают в одном приборе с указателем скольжения (крена), состоящем из плавно изогнутой стеклянной трубки, заполненной толуолом, внутри которой свободно перемещается шарик из черного стекла. При правильном развороте шарик под действием центробежной силы и силы веса будет находиться в середине трубки. Смещение шарика от нейтрального положения будет свидетельствовать о том, что вираж происходит со скольжением.
Автопилот предназначен для облегчения пилотирования самолета. При включении автопилота пилот освобождается от физической нагрузки по управлению самолетом, но он не освобождается от необходимости наблюдать и анализировать показания пилотажных приборов.
Автопилот осуществляет стабилизацию самолета относительно вертикальной, продольной, поперечной осей и позволяет также производить спуск, подъем и вираж.
Автопилот состоит из чувствительных элементов, промежуточного механизма (усилитель), рулевых машин (исполнительные механизмы), источников питания, пульта управления.
Чувствительными элементами автопилотов являются гироскопические приборы, внешняя рамка которых или гировертикаль имеют связь с электрическими, пневматическими, гидравлическими или другими датчиками.
Стабилизация самолета по трем осям координат осуществляется курсовым и продольно-поперечным стабилизаторами. Первый выдает сигналы отклонения от заданного положения по курсу и сигналы координации крена в зависимости от отклонения по курсу, второй — сигналы отклонения от продольной и поперечной осей и сигналы координации в зависимости от крена по курсу и углу тангажа.
Промежуточный механизм (усилитель) служит для усиления сигналов отклонения от заданного положения по осям стабилизации и определения направления этих отклонений.
Рулевые машины являются исполнительными механизмами, которые перекладывают и удерживают рули в положениях, соответствующих величинам и направлениям сигналов, поступающих от усилителя. В качестве исполнительных механизмов в автопилотах применяются гидравлические, пневматические и электрические устройства.
Пульт управления состоит из органов управления автопилотом и сигнальных лампочек.
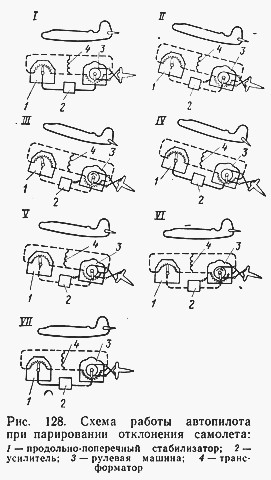
В качестве примера рассмотрим работу автопилота, схема которого представлена на рис. 128, по каналу «Высота» (продольная стабилизация самолета).
В прямолинейном горизонтальном полете щетки потенциометра продольно-поперечного стабилизатора (гировертикали) и рулевой машины руля высоты находятся в равнопотенциальных точках (положение I). В этом случае ток в цепи отсутствует и сигнал в усилитель не поступает. При отклонении самолета от заданного режима вследствие внешнего возмущения корпус гировертикали и связанный с ним потенциометр повернется вместе с самолетом. Щетка, связанная с осью карданного подвеса гироскопа, останется на месте, так как ось ротора гироско
па при отклонении самолета от первоначального режима сохраняет свое положение в пространстве. Потенциометр перемещается относительно щетки (положение II). Электрическое равенство цепи нарушается.
В результате этого в усилителе появляется сигнал определенного знака, что в свою очередь приводит к срабатыванию реле усилителя, посылающего сигнал в рулевую машину, отклоняющую руль для парирования действующего возмущения (положение III).
Руль отклоняется до тех пор, пока щетка тросового барабана Рулевой машины не дойдет до точки, имеющей равный потенциал с точкой на потенциометре гировертикали.
Отклоненный руль, противодействуя возмущающему моменту, начинает приводить самолет к исходному положению.
В некотором промежуточном положении щеток потенциометра гировертикали и потенциометра рулевой машины электрическая Цепь оказывается сбалансированной. Движение тросового барабана рулевой машины прекращается. Это происходит при вполне определенном соотношении между отклонением руля высоты и величиной сохранившегося еще возмущения (положение IV).
Под действием отклоненного руля самолет продолжает возвращаться в исходное положение, а вместе с ним и потенциометр гировертикали (положение V). Это вызывает новое нарушение балансировки электрической цепи моста и появление сигнала на усилителе и рулевой машине, но в обратном направлении. Результатом этого явится движение руля также к исходному положению, т. е. к нейтрали (положение VI).
Процесс восстановления будет продолжаться до тех пор, пока | самолет и руль не займут исходного положения, соответствующего прямолинейному горизонтальному полету (положение VII). При этом щетки потенциометров будут находиться в электрических центрах и мостик окажется сбалансированным. Совершенно аналогично работают и каналы «курса» и «крена» автопилота.
Используемая литература: «Основы авиации» авторы: Г.А. Никитин, Е.А. Баканов
Скачать реферат: У вас нет доступа к скачиванию файлов с нашего сервера. КАК ТУТ СКАЧИВАТЬ
СИСТЕМА ДИСТАНЦИОННОГО УПРАВАЕНИЯ
Система дистанционного управления (СДУ) — это система управления, в которой отсутствует традиционная механическая связь между рычагами управления и исполнительными элементами, отклоняющими аэродинамические органы управления. В СДУ вместо механических связей используются:
электрические связи — электродистанционные системы (ЭДСУ);

Рис. 12.10. Схема электродистанционной системы управления:
ЭГРГ1 — электрогидравлический рулевой привод
оптоволоконные связи — оптические дистанционные системы, в которых все связи или их основная часть реализованы на передаче сигналов управления по оптоволоконным каналам;
гидродистанционные связи, в которых прямая связь и часть обратных связей реализована на гидроэлементах, трубопроводах с гидрожидкостью; носителем информации является давление этой жидкости.
Наибольшее распространение в авиационной практике получили электродистанционные системы управления, основанные на использовании цифровых технологий (рис. 12.10).
Гидродистанционные системы управления нашли применение как резервные или аварийные в дополнение к основной электродистанционной системе. Такое сочетание двух дистанционных систем, основанных на использовании разных физических принципов передачи и отработки сигналов, позволяет повысить помехозащищенность и надежность СДУ. Однако объединение этих систем является довольно сложной технической проблемой.
Электродистанционная система позволяет обеспечить высокую точность и быстродействие в отработке сигналов вычислителя СДУ, в котором формируются сигналы отклонения аэродинамических рулей.
Все негативные факторы, присущие механической проводке, а именно сухое трение, люфты, зоны нечувствительности, трение, инерционность, упругость проводки, исключаются из тракта передачи управляющего сигнала летчика к органу. Тем самым существенно улучшаются динамические характеристики прямой цепи передачи команды летчика к органу, т.е. уменьшаются фазовое запаздывание и искажения величины сигнала (улучшаются амплитудно-фазовые характеристики прямой цепи).
Существенное улучшение тракта отработки сигналов на органы управления позволило реализовать сложные, интегральные (астатические) законы управления в современных аналоговых и цифровых вычислительных СДУ. Они выполняют больший перечень функций по обеспечению устойчивости, управляемости, повышению комфорта управления и повышению безопасности полета. Наиболее часто СДУ реализует следующие функции:
обеспечение заданных характеристик управляемости, т.е. статических и динамических характеристик управляемости: расходов рычагов и усилий на единицу регулируемого параметра, заданного времени срабатывания (быстродействия) и затухания, изолированности движения по управляемому параметру и т.д.;
автобалансировку (в продольном канале управления, а в некоторых случаях и в поперечном и путевом каналах). Автобалансировка — режим, при котором заданному (обычно, нейтральному) положению рычага управления соответствует установившийся прямолинейный (а возможно, и криволинейный) полет, реализуемый автоматически. В этом случае отклонение рычага по какому-либо каналу от нейтрали есть команда на выполнение заданного маневра в данном канале, интенсивность которого определяется величиной отклонения рычага. Установка рычага в нейтральном положении есть команда на выполнение установившегося движения в данном канале. Тем самым летчик освобождается от необходимости трим- мирования рычага через МЭТ или балансировки через стабилизатор (при использовании двух органов);
ограничение предельных параметров движения (угла атаки, нормальной перегрузки, максимальной скорости пикирования, максимальных углов тангажа и крена при взлете и посадке и т.д.);
предупреждение пилотов о приближении к критическим значениям параметров движения по крену, тангажу, углу атаки, скорости и числа М полета и т.д. Предупреждение пилотов о возникновении тенденции к выходу за предельные значения параметров полета или нарушения допустимой границы режима полета, а также ограничение предельных параметров движения существенно повышают безопасность полета. Эффективное предупреждение о возможном выходе за предельные значения параметров позволяет привлечь внимание пилотов к контролю тех параметров движения, которые определяют безопасность. Например, превышение угла атаки сваливания асв или снижение скорости ниже скорости сваливания Усп может вызвать сваливание, переход в штопор и, в конечном итоге, привести к катастрофе. Превышение пуэтах может вызвать недопустимые для массовой эксплуатации изменения в конструкции самолета, превышение (3 и а — помпаж двигателей и т.д. Более подробно эти вопросы рассмотрены в гл. 19;
стабилизацию углового положения самолета после окончания вмешательства летчика в управление. Стабилизация тангажа (угла наклона траектории) и угла крена (курса) обычно выполняется автопилотом. В последнее время включение и отключение этих режимов осуществляется автоматически по анализу усилий, прикладываемых летчиком к рычагу управления, или его перемещений. Есть усилие — режим стабилизации отключается, нет усилия — режим стабилизации включается. При этом стабилизируется то значение угла, которое имело место на момент последнего включения режима стабилизации. Эти режимы стабилизации существенно снижают нагрузку на пилота, так как отсутствует необходимость ручного выдерживания установившихся режимов полета, особенно в условиях возмущений. Поэтому эта функция на современных магистральных и маневренных боевых самолетах реализуется в СДУ;
активное управление нагрузками на конструкцию: снижение изгибающих моментов в корне крыла при маневрах и порывах ветра, демпфирование упругих колебаний крыла и фюзеляжа, снижение ветровых перегрузок и т.д. Активное управление нагрузками направлено на уменьшение темпа расходования ресурса за счет демпфирования упругих колебаний крыла и фюзеляжа, снижение максимальных изгибающих моментов при маневрах и порывах ветра с целью снижения расчетных нагрузок по прочности, повышения комфорта пассажиров и экипажа при полете в условиях интенсивной турбулентности и т.д. Активные системы выполняются либо в виде отдельных подсистем (отдельные вычислительные и исполнительные элементы), либо как часть СДУ, использующая одни и те же вычислительные и исполнительные элементы.
Для реализации перечисленных функций требуется применение сложных алгоритмов управления аэродинамическими поверхностями с использованием их реконфигурации. При использовании
СДУ рычаг управления в руках пилота превращается в задатчик требуемого параметра движения. Например, в продольном канале отклонению рычага соответствует заданное приращение нормальной перегрузки сверх потребной для прямолинейного полета; в поперечном канале отклонению рычага соответствует заданная угловая скорость крена со* и т.д. Таким образом, СДУ позволяет не только выдержать заданные характеристики управляемости, но и обеспечить требуемое их изменение по режимам полетов, конфигурациям самолета, весам и центровкам, а если требуется, обеспечить их полную инвариантность по режимам полета.
Широкие возможности и высокие точностные характеристики СДУ позволили управлять статически неустойчивым в продольном и других каналах самолетом с сохранением традиционного стереотипа действия рычагами управления. Переход на статически неустойчивую компоновку позволяет повысить маневренные возможности, улучшить взлетные характеристики и повысить топливную эффективность самолета.
В настоящее время СДУ широко используются на военных и гражданских самолетах (F-16, F-18, F-22, В-2, Evrofighter, Су-27, Як-130, А-320 и все последующие машины этого семейства, В 777, Ту-204, Ту-334). СДУ применяется в сочетании с эффективными мерами обеспечения безопасности пролета — резервированием, глубоким контролем состояния системы, надежным электро- и гидро- питанием. В СДУ идет постепенное вытеснение аналоговой техники цифровой. Цифровые СДУ (ЦСДУ) имеют более широкие возможности в решении задач, связанных с пилотированием самолета, в реализации сложных законов управления, обеспечивают более глубокую и эффективную организацию контроля и обмена данными.
Благодаря использованию ЦСДУ открылась широкая возможность интеграции всех систем управления в единый комплекс, предназначенный для решения задач по пилотированию самолета (рис. 12.11). В такой комплексной системе передача сигналов производится с помощью цифровых шин, использование которых позволяет существенно снизить массу системы управления. На каждую шину поступают данные отдатчиков параметров движения (угловые скорости, перегрузки, углы атаки и скольжения), системы высотно-скоростных параметров (системы воздушных сигналов — С ВС), бесплатформенной инерциальной навигационной системы (БИНС), системы автоматического управления (САУ) и других систем.

Рис. 12.11. Интеграция всех систем управления в единый комплекс:
ВСУП — вычислительная система управления полетом; КСУ — комбинированная система управления полетом
Каждый вычислитель активно взаимодействует только с одной шиной, но получает данные от всех шин для контроля. Каждый вычислитель имеет три независимых канала, которые отличаются типом процессора и программным обеспечением. Сигналы вычислителей через шины поступают на блоки управления и контроля (БУК) приводов органов управления.
В ряде случаев, особенно на первой стадии внедрения ЦСДУ, в качестве резерва используется аналоговая СДУ с более простыми законами управления, но достаточными для безопасного завершения полета.
Дистанционные системы управления используются в следующих сочетаниях:
СДУ как основная и единственная (на маневренных и отдельных гражданских самолетах);
СДУ в сочетании с механической системой; примеры таких комбинированных систем для управления продольным движением, креном и рысканием приведены на рис. 12.12 и 12.13. На рис. 12.12 приведена система с резервной механической проводкой. Развязывающая пружина является устройством, компенсирующим (блокирующим) работу механической проводки при работе СДУ. На рис. 12.13 приведена система с постоянно работающей механической проводкой. Дистанционная система управления по сигналу

Рис. 12.12. Схема системы управления с резервной механической проводкой:
МБ — механизм балансировки; М — муфта сцепления

Рис. 12.13. Схема системы управления с постоянной механической проводкой:
САЗ — система аварийной защиты; СП САЗ — сервопривод САЗ; СП СДУ — сервопривод СДУ; М — муфта сцепления
усилия реализуется системой автоматической загрузки (САЗ), которая перемещает проводку через привод САЗ;
СДУ как основная и гидродистанционная или механическая система как резервная.
Как и в НБУ с СУУ, общая надежность СДУ обеспечивается резервированным гидравлическим питанием (двукратным для маневренных самолетов, трех-четырехкратным для неманевренных). Между гидравлическими подсистемами выдерживается принцип полного разделения начиная от баков с рабочей жидкостью и кончая камерами рулевых приводов. Источниками давления в гидравлических системах являются насосы, устанавливаемые на двигателях самолета. На случай отказа двигателей предусматриваются различные вспомогательные источники энергии (вспомогательные силовые установки, электронасосы), обеспечивающие питание рулевых приводов и других потребителей в этих особых ситуациях. Более подробные сведения о структуре системы гидропитания и электропитания можно найти в [25, 26].
Обеспечение надежности электрического питания СДУ также основано на резервировании линий электроснабжения, так как СДУ относится к особой категории функционально значимых с точки зрения безопасности полета систем. В ней не допускаются даже кратковременные перерывы в питании, особенно эго относится к цифровым элементам системы, так как в этом случае самолет мгновенно становится неуправляемым.