Зачем покупать контроллер вентиляторов – выбираем лучший
В последние несколько лет популярность контроллеров вентиляторов ПК растет, и мы видим, что всё больше производителей корпусов, добавляют контроллеры вентиляторов в свои продукты. Оно и понятно – распространение мощных компонентов, таких как процессоры и видеокарты, ведёт к повышению температуры в вашей компьютерной системе, что требует установки дополнительных вентиляторов. Эта возросшая потребность в вентиляторах (плюс увлечение RGB) делает контроллеры вентиляторов весьма важной составляющей игровой сборки.
Когда дело доходит до сборки нового ПК, контроллер вентиляторов часто можно упустить из виду. Это достаточно справедливо, так как многие думают о том, чтобы отдать предпочтение новому кулеру вместо дополнительных вентиляторов.
Вместе с тем, увеличенные потоки воздуха и эстетичность, которые могут принести вентиляторы, обычно стоят того, чтобы начать использовать контроллер вентиляторов для организации и управления.
В этой статье мы расскажем о лучших контроллерах вентиляторов для ПК, о том, какой контроллер вентиляторов вам может понадобиться, и о нескольких вещах, которые следует учитывать перед покупкой.
Шим регулятор для вентилятора компьютера
Непонимание работы ШИМ или PWM ( Pulse-width modulation ) часто приводит не только к их неправильному использованию, но даже к ошибкам в проектировании устройств использующих ШИМ для управления. Здесь, ограничившись конкретным применением, я попытаюсь рассказать что такое ШИМ, для чего она требуется и как работает.
Сначала, что такое ШИМ.
| Широтно-импульсная модуляция (ШИМ, англ. Pulse-width modulation (PWM)) — управление средним значением напряжения на нагрузке путём изменения скважности импульсов, управляющих ключом. |
Когда нужна ШИМ
Главной причиной применения ШИМ является необходимость обеспечить пониженным постоянным напряжением силовых устройств электроники при сохранении высокого КПД, особенно в управляемых электроприводах.
Во внутренних сетях аппаратуры для питания устройств используется постоянное напряжение ограниченного набора напряжений, которые часто требуется изменить под требования конкретного устройства, стабилизировать или регулировать его. Это могут быть электроприводы постоянного тока, чипы, узлы радиоаппаратуры.
Регулировку можно осуществлять с помощью гасящих напряжение устройств: резисторов, транзисторов (если требуется регулировка). Главный недостаток такого решения потери мощности и повышенное тепловыделение на регулирующих устройствах.
Поскольку известно что выделяемая мощность равна :
P = I x U или P = I 2 x R Вт.
то чем больше ток I в цепи и падение напряжения U , тем больше потери мощности. Здесь R — величина сопротивления регулирующего элемента.
Представьте что требуется погасить хотя бы 3 V при токе нагрузки 10 A , это уже 30 Вт истраченных в пустую. А каждый ватт теряемой мощности не только снижает продолжительность работы источников питания, но и требует дополнительного оборудования для вывода выделяемого, этой мощностью, тепла.
Это относится к гасящим резисторам и полупроводниковым приборам тоже.
Но хорошо известно, что полупроводниковые приборы очень хорошо (с малыми потерями и тепловыделением) работают как ключи, когда имеют только два состояния открыт/закрыт.
Этот режим позволяет снизить потери на коммутирующем полупроводниковом приборе до уровня:
U нас для современных полупроводниковых коммутаторов приближается к 0,3 v и при потребляемых токах 10 А потери мощности будут приближаться к 3 Вт. Это в режиме ключа, а при работе в устройствах ШИМ и меньше.
| В ШИМ в качестве ключевых элементов использует полупроводниковые приборы в ключевом режиме, то есть транзистор всё время или разомкнут (выключен), или замкнут (находится в состоянии насыщения). В первом случае транзистор имеет почти бесконечное сопротивление, поэтому ток в цепи весьма мал, и, хотя всё напряжение питания падает на транзисторе, выделяемая на транзисторе мощность практически равна нулю. Во втором случае сопротивление транзистора крайне мало, и, следовательно, падение напряжения на нём близко к нулю — выделяемая мощность также мала. В переходных состояниях (переход ключа из проводящего состояния в непроводящее и обратно) мощность выделяемая в ключе значительна, но так как длительность переходных состояний крайне мала, по отношению к периоду модуляции, то средняя мощность потерь на переключение оказывается незначительной. |
Реализовать преимущества ключевого режима в схемах понижающих и регулирующих напряжение постоянного тока, позволило использование ШИМ.
Повторюсь, широтно-импульсная модуляция — управление средним значением напряжения на интегрирующей нагрузке путём изменения скважности импульсов, с помощью управляющего ключа.
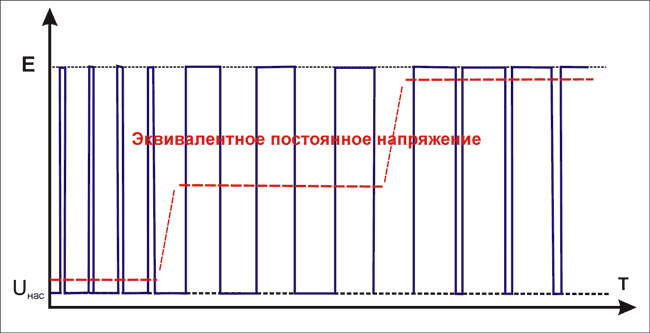
Работа ШИМ на интегрирующую нагрузку показана на рис. 1.
Главным условиям такого применения ШИМ является наличие интегрирующей нагрузки.
Потому что амплитудное значение напряжения равно E .
Это могут быть интегрирующая RC, LC, RLC или RL цепи и механические интеграторы (например электромотор).
При работе ШИМ на интегрирующей нагрузке напряжение — эквивалентное постоянное напряжение изменяется в зависимости от скважности ( Q ) импульсов.
здесь: Q — скважность, t и — длительность импульса, T — период следования импульсов.
С учетом скважности эквивалентное постоянное напряжение будет равно:
E экв = Q x E Вольт
здесь: E экв — эквивалентное постоянное напряжение ( Вольт ), Q — скважность, E — напряжение источника от которого запитан ШИМ преобразователь ( Вольт ).
Реально на зажимы нагрузки ШИМ подается напряжение равное E , а работа совершаемая электрическим током (или число оборотов электродвигателя) определяется именно E экв . При восстановлении на интегрирующем конденсаторе получаем именно напряжение E экв.
Мощность выделяемая на управляющем ключе, управляемом ШИМ равна:
Схема подключения нагрузки к ШИМ.
Никаких отличных от схемы включения электродвигателя на постоянном токе (частный случай нагрузки) схемных решений ШИМ не требует. Просто электродвичатель подключается к источнику питания работающего в режиме ШИМ. Разве что, в определенных ситуациях требуется ввести дополнительную фильтрацию помех возникающих на фронтах импульсов. Этот фильтр на рис. 2 в виде конденсаторов и демпфирующего диода.
На рис. 2 показано такое подключение.
Мы видим, что коммутатор (полевой транзистор) можно просто заменить на переменный резистор.
Схема PWM
В статье «Переходник для вентилятора 3 pin на 4 pin» http://de1fer.ru/?p=45#more-45 владелец блога приводит схему вентилятора с P WM .
здесь: GND — земля (общий), Control — контакт P WM управления, +12 — напряжение питания, Sense — вывод датчика оборотов.
В данной схеме управление возможно скорее постоянным током +I упр, чем ШИМ сигналом.
Для управления импульсным (ШИМ) сигналом требуется схема изображенная на рис. 4. Да и судя по параметрам транзистора «PWM» он выбирался именно для управления постоянным током. По крайней мере он будет нормально работать в таком режиме с вентилятором до 1,6 Вт.
А вот в импульсном режиме без конденсатора C , транзистор BC879 будет греться немного меньше чем на постоянном токе и возможен останов электродвигателя на малых длительностях токового импульса (малых оборотах) из-за его интегрирования на входной емкости C вх транзистора.
Основные параметры кремниевого биполярного высокочастотного n-p-n транзистора BC879 от SIEMENS
| Pc max | Ucb max | Uce max | Ueb max | Ic max | Tj max, °C | Ft max |
| 800mW | 100V | 80V | 5V | 1A | 150°C | 200MHz |
В случае необходимости отключить PWM (ШИМ) управление в схеме показанной на рис. 3 необходимо просто соединить вывод Control с проводом +12v .
Есть другой вариант схемы вентилятора с P WM на форуме Radeon.ru
Существенных отличий от рис. 3 нет, только в качестве управляемого ШИМ ключа используется МОП полевой транзистор со встроенным или индуцированным каналом p- типа. Данная схема тоже может управляться как P WM так и постоянным напряжением (но рисковать не стоит — надо знать параметры транзистора).
Данная схема вполне работоспособна и не имеет недостатков схемы показанной на рис. 3.
Для отключения (в зависимости от типа транзистора) достаточно соединить вывод Control с проводом + или -.
Вниманию самодельщиков!
Я бы не рекомендовал применение вентиляторов имеющих встроенный PWM (4- pin ) одновременно с какими либо иным регуляторам оборотов вентилятора.
В случае если Вас не устраивает алгоритм управления PWM встроенного на материнскую (системную) плату.
И у Вас есть устраивающий Вас реобас (контроллер управления вентилятором), то используйте вентилятор с 3-pin соединитель.
Если вентилятор с PWM вам дорог или не имеет замены — то необходимо отключить PWM , способом описанным выше, заменив соединитель 4-pin на 3-pin и подключить к реобасу.
Но помните применение вентилятора с PWM в любом нештатном режиме не позволит достичь его максимальной производительности.
Применение одновременно с PWM — токового управления на постоянном токе не рекомендуется по причине снижение напряжения питания вентилятора на 10-20%, что не даст вывести такой вентилятор на полную производительность.
Применение одновременно с PWM — ШИМ по цепи питания может привести к периодической нестабильности работы вентилятора (возможно возникновение скользящих биений между частотами PWM — ШИМ по цепи питания систем) и создать неоднозначность для систем оснащенных системой стабилизации оборотов. Кроме того как и в предыдущем случае на 10-15% снизится результирующее напряжение на вентиляторе, что не даст вывести такой вентилятор на полную производительность.
Так что остановитесь на чем-то одном. Или используйте вентилятор с PWM , или применяйте внешнее управление вентилятором по цепи питания на вентиляторе с 3-pin разъемом.
Заключение
Применение PWM или ,как привыкли говорить мы, ШИМ повышает КПД понижающих напряжение устройств постоянного тока, что снижает общее тепловыделение электронных устройств с ШИМ.
ШИМ позволяет создавать компактные системы регулируемого электропривода постоянного тока большой мощности.
В современных устройствах постоянного тока управляющих напряжением и понижающих стабилизаторах напряжениях обычно регулировки выполняются с помощью ШИМ. Для этого выпускаются контроллеры требующие минимум навесных элементов.
Вентиляторы PWM и правила управления
Сигнал ШИМ прямоугольного типа должен подаваться на вход PWM вентилятора и соответствовать следующим спецификациям:
- Целевая частота: 25 кГц, допустимый диапазон от 21 кГц до 28 кГц
- Максимальное напряжение для низкого логического уровня: VIL = 0,8 В
- Абсолютный максимальный получаемый ток: Imax = 5 мА (ток короткого замыкания)
- Абсолютный максимальный уровень напряжения: Vmax = 5,25 В (напряжение холостого хода)
- Допустимый диапазон рабочего цикла: от 0% до 100% (не инвертируется. Рабочий цикл 100% PWM / 5 В приводит к максимальной скорости вентилятора)
Внешний подтягивающий резистор здесь не нужен, так как сигнал подтягивается до 3,3 В / 5 В внутри вентилятора. Кроме того, работа при цикле ШИМ ниже 20% официально не поддерживается в спецификации (неопределенное поведение). Тем не менее, большинство вентиляторов PWM могут работать при нагрузке ниже 20% и остановятся при рабочем цикле лишь 0%. Они работают на полной номинальной скорости при отсутствии входного сигнала ШИМ.
Внимание: подключение напряжения питания 12 В к выводу ШИМ приведет к немедленному повреждению вентилятора!
Далее показано изображение трехпроводного кулера. Кажется что это обычный бесщеточный мотор постоянного тока (BLDC) с выходом тахо-сигнала, но это вентилятор с ШИМ (KFB-1412H от Delta Electronics), сделанный для PS3, а его третий провод – для управления скоростью вентилятора.

Если надо подключить этот вентилятор, просто подайте 12 В на коричневый (+ V) и черный (GND) провода, а на серый (PWM) подайте последовательность импульсов уровня TTL (5 В), близкую к 25 кГц от сигнала генератора, и изменяйте коэффициент заполнения последовательности импульсов (0–100%), чтобы отрегулировать скорость.

Обычно скорость кулера с ШИМ масштабируется линейно с рабочим циклом сигнала PWM между максимальной скоростью при 100% и указанной минимальной скоростью при 20%. Например, если вентилятор с PWM имеет максимальную скорость 2000 об / мин и минимальную скорость 450 об / мин, он будет работать со скоростью 2000 об / мин при 100% PWM, 450 об / мин при 20% и около 1100 об / мин при 50% PWM.

Некоторые производители рекомендуют использовать для управления схему типа CMOS-инвертора, подобную показанной выше.
Разновидности
Регуляторы ограничения скорости вентилятора бывают нескольких видов.
Ступенчатые модели с применением автотрансформатора
Суть работы этого прибора заключается в том, что обмотка прибора разветвлена, поэтому в процессе подключения к ответвлениям вентилятор получает несколько пониженное напряжение. При помощи специального переключателя тот или иной вентилятор подключается к нужному участку обмотки, а скорость его вращения падает. Синхронно с этим снижается потребление электричества, что приводит к общей экономии ресурса.
Регулировка прибора осуществляется при помощи специальной ручки, оснащённой ступенчатой шкалой, имеющей 5 положений. Достоинствами моделей является их надёжность и долгий срок службы. К недостаткам относят довольно габаритный блок управления, что не всегда удобно при размещении устройства в ограниченных пространствах, а также невозможность плавного переключения. Однако при подключении датчиков температуры и таймера переключение скоростей вращения можно автоматизировать.


Автотрансформаторы с электронным управлением
Суть работы таких устройств несколько отличается от принципа действия предыдущих моделей. Прибор оснащён транзисторной схемой и способен модулировать импульсы, плавно изменяя при этом напряжение. Сила напряжения напрямую зависит от частоты импульсов и пауз между ними. Так, при коротких импульсах и длинных паузах напряжение будет намного ниже, чем при длинных импульсах и коротких паузах.
Преимуществами данного контроллера являются небольшие размеры и комфортная стоимость. К недостаткам относят короткую длину соединяющего кабеля. Это вызывает необходимость отдельного расположения блока от ручки управления и его размещения поближе к вентилятору. Электронные модели используются на крупных производствах в сочетании с мощными вентиляционными установками. Они устойчивы к перегрузкам и способны к непрерывной работе в течение длительного времени.


Симисторный (тиристорный) контроллер
Данный вид регуляторов является самым распространённым. Прибор используется для подключения к однофазному вентилятору переменного тока, однако, может работать и с постоянным. При работе прибора каждый из тиристоров понижает выходное напряжение, уменьшая тем самым количество оборотов в минуту. Плюсами устройств является низкая стоимость, небольшой вес и возможность убавления числа оборотов практически до нуля.


Схема регулятора скорости вентилятора для уменьшения шума
В отличии от схемы, которая замедляет обороты вентилятора после старта (для уверенного запуска вентилятора), данная схема позволит увеличить эффективность работы вентилятора путем увеличения оборотов при повышении температуры датчика. Схема также позволяет уменьшить шум вентилятора и продлить его срок службы.
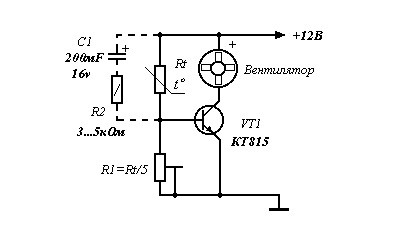
Необходимые для сборки детали:
- Биполярный транзистор (VT1) — КТ815А.
- Электролитический конденсатор (С1) — 200 мкФ/16В.
- Переменный резистор (R1) — Rt/5.
- Терморезистор (Rt) — 10–30 кОм.
- Резистор (R2) — 3–5 кОм (1 Вт).
Настройка производится до закрепления термодатчика на радиаторе. Вращая R1, добиваемся, чтобы вентилятор остановился. Затем, вращая в обратную сторону, заставляем его гарантированно запускаться при зажимании терморезистора между пальцами (36 градусов).
Если ваш вентилятор иногда не запускается даже при сильном нагреве (паяльник поднести), то нужно добавить цепочку С1, R2. Тогда R1 выставляем так, чтобы вентилятор гарантированно запускался при подаче напряжения на холодный блок питания. Через несколько секунд после заpяда конденсатора, обороты падали, но полностью вентилятор не останавливался. Теперь закрепляем датчик и проверяем, как все это будет крутится пpи реальной работе.
Rt — любой терморезистор с отрицательным ТКЕ, например, ММТ1 номиналом 10–30 кОм. Терморезистор крепится (приклеивается) через тонкую изолирующую прокладку (лучше слюдяную) к радиатору высоковольтных транзисторов (или к одному из них).
Видео о сборке регулятора оборотов вентилятора:
Шум, издаваемый вентиляторами в современных компьютерах довольно сильный, и это является достаточно распространенной проблемой среди пользователей. Помочь в снижении шума, издаваемого компьютерными вентиляторами системного блока, может регулятор частоты вращения вентилятора или кулера. В продаже имеются различные регуляторы, имеющие разнообразные дополнительные функции и возможности (контроль температуры, автоматическую регулировку скорости и т.д.).
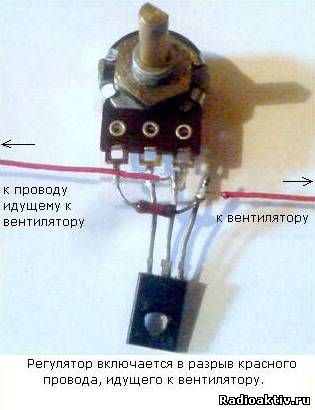
Схема регулятора оборотов вентилятора.
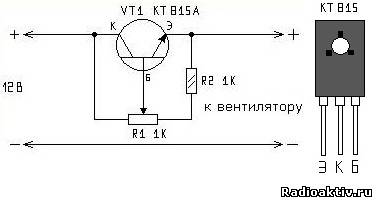
Схема достаточно простая, и содержит всего три электронных компонента: транзистор, резистор, и переменный резистор.
В схему специально введён постоянный резистор R2, назначение которого ограничить минимальные обороты вентилятора, для того, что бы даже при самых низких оборотах обеспечить его надёжный запуск. Иначе пользователь может поставить слишком низкое напряжение на вентиляторе, при котором он будет продолжать крутиться, но которого будет недостаточно для его запуска при включении.
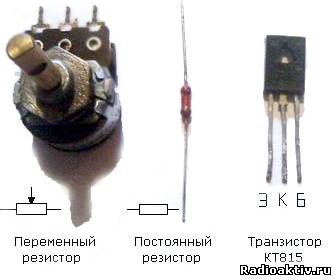
- В схеме применен довольно распространенный транзистор КТ815, его несложно приобрести на радио рынке, или даже выпаять из старой советской аппаратуры. Подойдет любой транзистор из серии КТ815, КТ817 или КТ819, с любой буквой в конце.
- Переменный резистор, применяемый в схеме, может быть совершенно любым, подходящим по габаритам, главное, он должен иметь сопротивление 1кОм.
- Постоянный резистор может быть любого типа с сопротивлением 1 или 1.2 кОм.
Дополнительно стоит отметить, что если у Вас возникнут трудности с приобретением переменного резистора необходимого сопротивления, то в схеме можно применить переменный резистор R1 сопротивлением от 470 Ом до 4,7 кОм, но при этом придётся изменить и сопротивление резистора R2, оно должно быть таким же, как и у R1.
Монтаж и подключение регулятора скорости.
Монтаж всей схемы осуществляется прямо на ножках переменного резистора, и проводится очень просто:
Характеристики регуляторов скорости вращения вентиляторов
Тип реобаса

Основная задача разветвителя питания – обеспечить питанием дополнительные вентиляторы, для которых не нашлось разъемов на материнской плате. Разветвитель может и вообще не иметь функции управления скоростью вращения вентиляторов. Если такая функция и есть, то реализована она будет программно.

Регулятор оборотов (реобас) – обладает большей, по сравнению с разветвителем, функциональностью. Кроме подключения дополнительных вентиляторов, реобас предоставляет и некоторые дополнительные возможности, среди которых могут быть:
— контроль и отображение скорости вращения каждого подключенного вентилятора;
— контроль температуры от собственного термодатчика (или нескольких термодатчиков);
— автоматическая или ручная регулировка скоростей вращения вентиляторов;
— контроль и отображение мощности, потребляемой подключенными вентиляторами
Тип управления скоростью вращения может быть ручным или автоматическим.
При ручном управлении скорость вращения задается оператором вручную – с помощью кнопок, ручки регулятора или на сенсорном экране. Несмотря на простоту такого способа управления, удобным он будет только в тех случаях, когда не требуется менять скорость вращения вентиляторов во время работы компьютера. Для подстройки скорости вращения корпусных вентиляторов такой способ еще сгодится, а для управления скоростью вращения кулера процессора – уже нет.
Автоматический тип управления, предусматривающий автоматическое изменение скорости вращения кулера в зависимости от показаний термодатчика, намного удобнее в эксплуатации и обеспечивает лучшие условия работы оборудования. Для управления кулерами элементов, сильно меняющих температуру в зависимости от нагрузки, следует использовать реобасы с автоматическим типом управления.
Количество подключаемых вентиляторов определяет, какое максимальное количество вентиляторов можно подключить к реобасу. Следует иметь в виду, что с ростом количества подключенных вентиляторов, растет и потребляемая устройством мощность; у блока питания компьютера должен быть достаточный запас мощности.

Наличие дисплея с возможностью вывода на него значений температур и скоростей вращения вентиляторов в некоторых случаях может оказаться нелишним. Дисплей может предупредить о приближающемся перегреве или неисправности вентилятора и предотвратить сбой или потерю данных. Для серверов (часто не имеющих своего монитора) такой дисплей будет особенно полезен.

Контроль температуры осуществляется по термодатчикам материнской платы либо по собственным термодатчикам реобаса. В последнем случае следует также выяснить количество каналов измерения температуры (проще говоря, количество термодатчиков). У многих реобасов контроль температуры производится по одному термодатчику. Если к такому реобасу предполагается подключение и кулеров процессора/видеокарты, это может привести к проблемам (если установить датчик у процессора, он может «не заметить» перегрева видеокарты и наоборот). Реобасы с несколькими термодатчиками стоят дороже, но в случаях, аналогичных вышеприведенному, на этом экономить не стоит.

Разъемы для подключения вентиляторов могут быть 2-pin 3-pin и 4-pin.
2-pin и 3-pin разъемы предполагают управление скоростью вращения вентилятора с помощью изменения его напряжения питания. Этот наиболее простой способ, поэтому реализующие его реобасы и вентиляторы недороги. Недостатками этого способа является невысокая точность задания частоты вращения и снижение крутящего момента со снижением напряжения. Вентиляторы с 3-pin разъемом вообще не могут крутиться медленнее некоторого порогового значения – крутящий момент становится настолько мал, что его не хватает для проворота крыльчатки. Для корпусных вентиляторов и вентиляторов жестких дисков такие вентиляторы подойдут, но на процессоры уже давно принято ставить вентиляторы, подключаемые 4-pin разъемом.
4-pin разъемы предполагают управление скоростью вращения вентилятора с помощью широтно-импульсной модуляции (ШИМ). При этом питание на вентилятор подается полное — 12 вольт – но не постоянно, а импульсами, меняя продолжительность которых, можно очень точно задавать частоту вращения вентилятора. Кроме того, при таком способе нет ограничения на минимальную скорость вращения – регулируемый таким способом вентилятор может вращаться даже со скоростью 1 об/мин. Единственный недостаток такого способа – он сложнее в реализации, а следовательно, дороже.
Разъем питания реобаса может быть 3-pin (в этом случае регулятор скорости подключается к одному из свободных 3-pin разъемов материнской платы) 4-pin Molex (питание берется с одного из разъемов блока питания) и SATA (питание берется с разъема SATA материнской платы).











