HackWare.ru
Язык Python является в настоящее время очень популярным и многие инструменты для сбора информации, сканирования, тестирования на проникновение, оценки безопасности написаны на Python. Все эти инструменты без проблем работают в Linux. Но на самом деле, подавляющее большинство инструментов может работать и в Windows — достаточно просто выполнить несложную установку Python.
Python — это скриптовый (интерпретируемый) язык, то есть программы перед запуском не нужно предварительно компилировать. В этом смысле Python похож на PHP.
В настоящее время существует две главных версии Python:
Они существенно различаются между собой, в том числе и синтаксисом, то есть программа, написанная на одной версии, может не работать в интерпретаторе другой версии. Тем не менее сейчас уже обозначен срок завершения поддержки Python 2.x и эту версию можно считать устаревшей. Поэтому я предлагаю установить только Python 3. Хотя если вы не согласны, то пишите в комментариях и я дополню инструкцию установкой второй версии. Хоть мы не получим старую версию, зато я дополнительно покажу, как установить PIP — систему управления пакетами Python, — а также как подключить Python в качестве модуля веб-сервера — то есть он сможет выполнять такие же функции, что и PHP.
Установка PIP В Windows
Выполните действия, описанные ниже, чтобы установить PIP в Windows.
Шаг 1: Загрузите PIP get-pip.py
Перед установкой PIP скачайте get-pip.py файл.
1. Запустите командную строку, если она еще не открыта. Для этого откройте строку поиска Windows, введите cmd и нажмите на значок командной строки.
2. Далее выполните следующую команду, чтобы загрузить get-pip.py файл:
curl https://bootstrap.pypa.io/get-pip.py -o get-pip.py

Шаг 2: Установка PIP в Windows
Чтобы установить PIP, введите следующую команду в cmd:

Если файл не найден, дважды проверьте путь к папке, в которой вы сохранили файл. Вы можете просмотреть содержимое текущего каталога, используя следующую команду:
Команда dir возвращает полный список содержимого каталога.
Шаг 3: Проверка установки pip в ОС Windows
После установки PIP вы можете проверить, была ли установка успешной, для этого введите следующую команду:
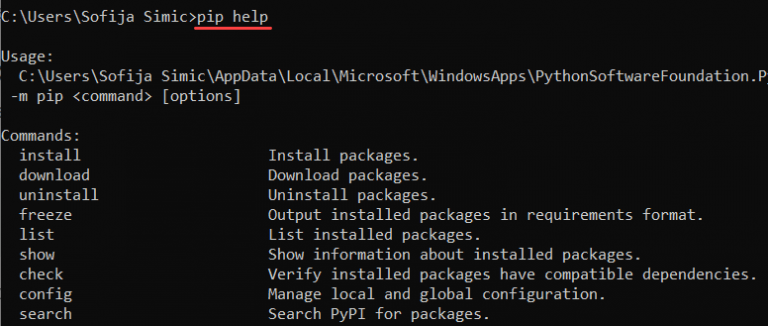
Если PIP был установлен, программа запускается, и вы должны увидеть расположение пакета программного обеспечения и список команд, с которыми вы можете работать pip .
Если вы получите сообщение об ошибке, тогда повторите процесс установки.
Шаг 4. Добавьте PiP в переменную среду Windows PATH
Чтобы запустить PIP из любого места, вам необходимо добавить его в переменные среды Windows, чтобы избежать ошибки «not on PATH«. Для этого выполните действия, описанные ниже:
- Откройте компьютер и нажмите свойства
- Далее дополнительные параметры системы
- Нажмите на кнопку Переменные среды и дважды щелкните переменную Пути в Системных переменных.
- Затем выберите Создать и добавьте каталог, в который вы установили PIP.
- Нажмите кнопку ОК, чтобы сохранить изменения.
Шаг 5: Настройка
В Windows файл конфигурации PIP является %HOME%pippip.ini.
Существует также устаревший файл конфигурации для каждого пользователя. Файл находится по адресу %APPDATA%pippip.ini .
Вы можете задать пользовательский путь для этого файла конфигурации с помощью переменной среды PIP_CONFIG_FILE .
Ремонт импульсных блоков питания
Неисправности импульсных блоков питания, ремонт
Исходя из схемы импульсного блока питания перейдем к ее ремонту. Возможные неисправности:
- Если сгорел варистор и предохранитель на входе или VCR1, то ищем дальше. Потому, что они так просто не горят.
- Сгорел диодный мост. Обычно это микросхема. Если есть защитный диод, то и он обычно горит. Нужна их замена.
- Испорчен конденсатор C1 на 400В. Редко, но бывает. Часто его неисправность можно выявить по внешнему виду. Но не всегда. Иногда внешне исправный конденсатор оказывается плохим. Например, по внутреннему сопротивлению.
- Если сгорел переключающий транзистор, то выпаиваем и проверяем его. При неисправности требуется замена.
- Если не работает ШИМ регулятор, то меняем его.
- Замыкание, а также обрыв обмоток трансформатора. Шансы на починку минимальны.
- Неисправность оптопары — крайне редкий случай.
- Неисправность стабилизатора TL431. Для диагностики замеряем сопротивление.
- Если КЗ в конденсаторах на выходе блока питания, то выпаиваем и диагностируем тестером.
Примеры ремонта импульсных блоков питания
Например, рассмотрим ремонт импульсного блока питания на несколько напряжений.

Неисправность заключалась в в отсутствии на выходе блока выходных напряжений.
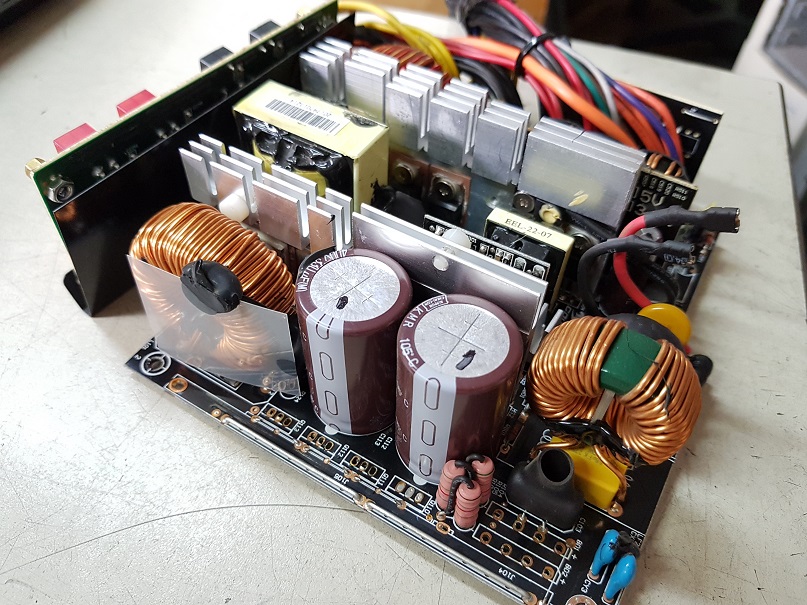
Например, в одном блоке питания оказались неисправны два конденсатора 1 и 2 в первичной цепи. Но они не были вздутыми.

На втором не работал ШИМ контроллер.
На вид все конденсаторы на снимке рабочие, но внутреннее сопротивление у них большое. Более того, внутреннее сопротивление ESR конденсатора 2 в кружке оказалось в несколько раз выше номинального. Этот конденсатор стоит в цепи обвязки ШИМ регулятора, поэтому регулятор не работал. Работоспособность блока питания восстановилась только после замены этого конденсатора. Потому что ШИМ заработал.
Ремонт компьютерных блоков питания
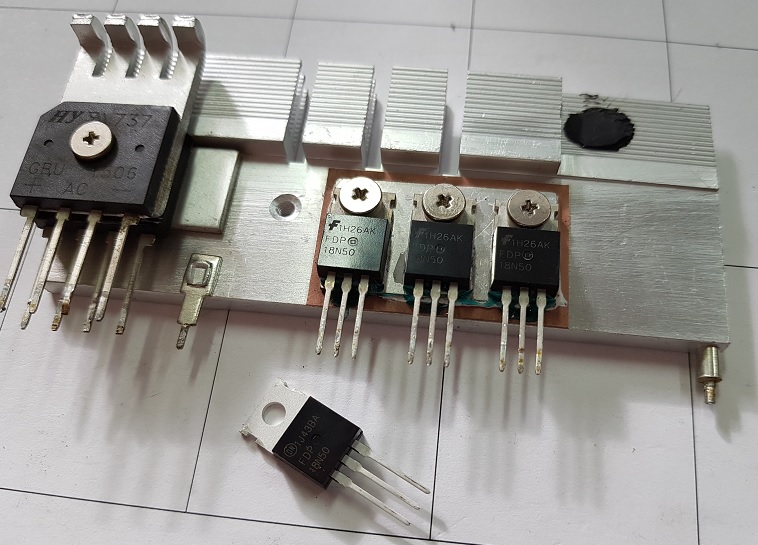
Пример ремонта блока питания компьютера. В ремонт поступил дорогой блок питания на 800 Вт. При его включении выбивало защитный автомат.
Выяснилось, что короткое замыкание вызывал сгоревший транзистор в первичной цепи питания. Цена ремонта составила 3000 руб.
Имеет смысл чинить только качественные дорогие компьютерные блоки питания. Потому что ремонт БП может оказаться дороже нового.
A20-OlinuXino-Lime2

Компания/проект — Olimex, OlinuXino, Mouser
Страница продукта
CPU — Allwinner A20 (2x Cortex-A7 @ 1GHz); Mali-400 GPU
Память — 1GB DDR3 RAM; optional 4GB eMMC version
Цена — $50 (45 евро); $61 (55 евро) за версию 4GB
OlinuXino — проект болгарской компании Olimex, один из старейших проектов «хакерских» плат, однако компания в последнее время сосредоточена на open-source, но не Linux-совместимой платформе ESP32. Большая активность на форуме oLinuXino касается плат на Linux, и ранее в этом году стартовал open-source проект набора Linux-ноутбука Teres-A64 на основе процессора Allwinner A64 за 225 евро. Несмотря на это, старая плата A20-OlinuXino-Lime2 по-прежнему интересна, имеет порт Gigabit Ethernet (GbE, or 10/100/1000Mbps), слот microSD, порт HDMI, интерфейс LCD, 3x порта USB, поддержка батареи, и 160 портов GPIO. Плата имеет размер 84 x 60mm, операционные системы Android 4.2.2 или Debian Jessie с ядром Linux 3.4.1. В этом году, Lime2 перешла на ту же ревизию платы, что и Lime2-4GB/eMMC, имеющую RTL8211E Ethernet PHY, соединённые с землёй платы монтажные отверстия, прямолинейный контур без вырезов.
Доработка 3. Диммирование
На плате драйвера имеется три контакта с надписью DIMM, что наводит на мысль, что данный драйвер может управлять мощностью светодиодов. О том же говорит и даташит на микросхему, хотя типовых схем диммирования в них не приведено. Из даташита можно почерпнуть информацию, что подавая на ногу 7 микросхемы напряжение -0.3 — 6В, можно получить плавное регулирование мощности.
Подключение к контактам DIMM переменного резистора ни к чему не приводит, кроме того, нога 7 микросхемы драйвера вообще ни к чему не подключена. Значит снова доработки.
Подпаиваем резистор на 100К к ноге 7 микросхемы
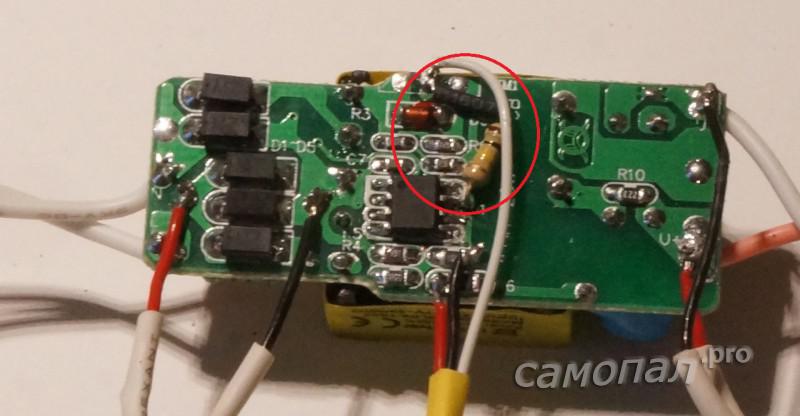
Теперь подавая между землей и резистором напряжение 0-5В получаем ток 60-600мА
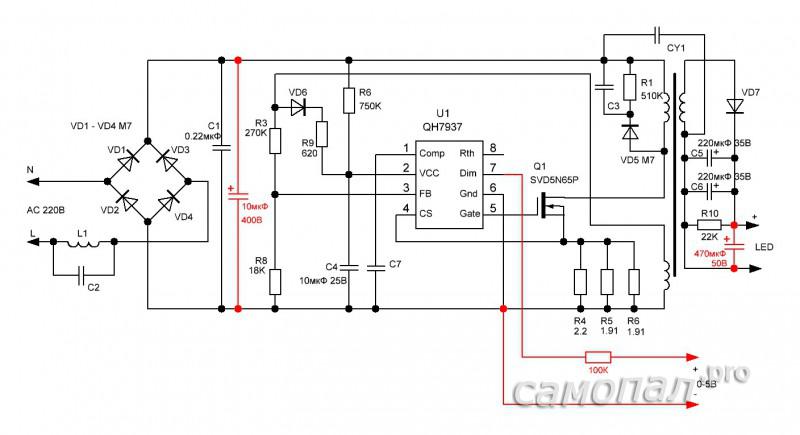
Чтобы уменьшить минимальный ток диммирования, необходимо уменьшить и резистор. К сожалению, в даташите про это ничего не написано, поэтому подбирать все компоненты придется опытны путем. Меня лично устроило диммирования от 60 до 600мА.
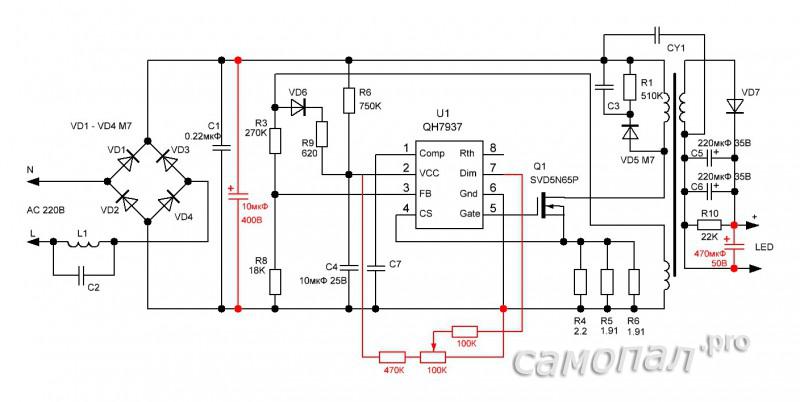
Если нужно организовать диммирование без внешнего питания, то можно взять напряжение питания драйвера ~15В (нога 2 микросхемы или резистор R7) и подать по следующей схеме.
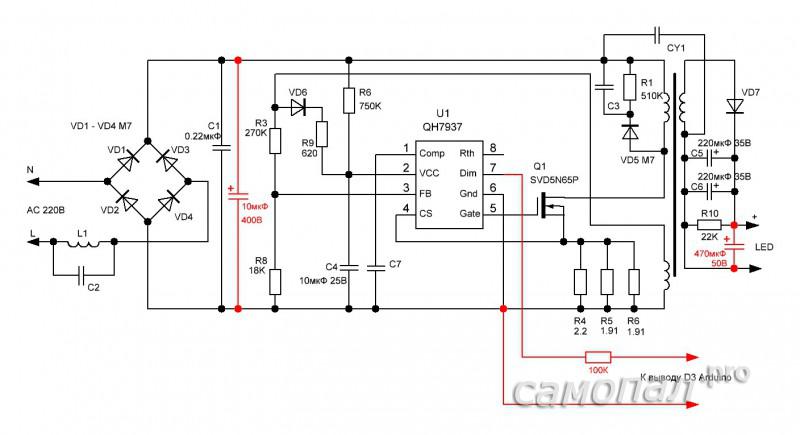
Ну и, напоследок, подаю ШИМ с D3 ардуино на диммирующий вход.
Пишу простейший скетч, меняющий уровень ШИМ от 0 до максимуму и обратно:
#include
void setup() pinMode(3, OUTPUT);
Serial.begin(9600);
analogWrite(3,0);
>void loop() for( int i=0; i < 255; i+=10 )analogWrite(3,i);
delay(500);
>
for( int i=255; i>=0; i-=10 ) analogWrite(3,i);
delay(500);
>
>
Получаю диммирование при помощи ШИМ.
Диммирование при помощи ШИМ увеличивает выходные пульсации примерно на 10-20% по сравнению с управлением постоянным током. Максимально пульсации увеличиваются примерно вдвое при установке тока драйвера в половину от максимального.
Установка PIP В Windows
Выполните действия, описанные ниже, чтобы установить PIP в Windows.
Шаг 1: Загрузите PIP get-pip.py
Перед установкой PIP скачайте get-pip.py файл.
1. Запустите командную строку, если она еще не открыта. Для этого откройте строку поиска Windows, введите cmd и нажмите на значок командной строки.
2. Далее выполните следующую команду, чтобы загрузить get-pip.py файл:
curl https://bootstrap.pypa.io/get-pip.py -o get-pip.py
Шаг 2: Установка PIP в Windows
Чтобы установить PIP, введите следующую команду в cmd:
Если файл не найден, дважды проверьте путь к папке, в которой вы сохранили файл. Вы можете просмотреть содержимое текущего каталога, используя следующую команду:
Команда dir возвращает полный список содержимого каталога.
Шаг 3: Проверка установки pip в ОС Windows
После установки PIP вы можете проверить, была ли установка успешной, для этого введите следующую команду:
Если PIP был установлен, программа запускается, и вы должны увидеть расположение пакета программного обеспечения и список команд, с которыми вы можете работать pip .
Если вы получите сообщение об ошибке, тогда повторите процесс установки.
Шаг 4. Добавьте PiP в переменную среду Windows PATH
Чтобы запустить PIP из любого места, вам необходимо добавить его в переменные среды Windows, чтобы избежать ошибки «not on PATH«. Для этого выполните действия, описанные ниже:
- Откройте компьютер и нажмите свойства
- Далее дополнительные параметры системы
- Нажмите на кнопку Переменные среды и дважды щелкните переменную Пути в Системных переменных.
- Затем выберите Создать и добавьте каталог, в который вы установили PIP.
- Нажмите кнопку ОК, чтобы сохранить изменения.
Шаг 5: Настройка
В Windows файл конфигурации PIP является %HOME%pippip.ini.
Существует также устаревший файл конфигурации для каждого пользователя. Файл находится по адресу %APPDATA%pippip.ini .
Вы можете задать пользовательский путь для этого файла конфигурации с помощью переменной среды PIP_CONFIG_FILE .
Команды PIP
PIP содержит множество команд для анализа и работы с модулями и пакетами Python.
Следующая команда может использоваться для получения информации о командах, поддерживаемых самим PIP.

Работа импульсного блока питания
Первичная цепь импульсного блока питания
Первичная цепь схемы блока питания расположена до импульсного ферритового трансформатора.
На входе блока расположен предохранитель.
Затем стоит фильтр CLC. Катушка, кстати, используется для подавления синфазных помех. Вслед за фильтром располагается выпрямитель на основе диодного моста и электролитического конденсатора. Для защиты от коротких высоковольтных импульсов после предохранителя параллельно входному конденсатору устанавливают варистор. Сопротивление варистора резко падает при повышенном напряжении. Поэтому весь избыточный ток идет через него в предохранитель, который сгорает, выключая входную цепь.
Защитный диод D0 нужен для того, чтобы предохранить схему блока питания, если выйдет из строя диодный мост. Диод не даст пройти отрицательному напряжению в основную схему. Потому, что откроется и сгорит предохранитель.
За диодом стоит варистор на 4-5 ом для сглаживания резких скачков потребления тока в момент включения. А также для первоначальной зарядки конденсатора C1.
Активные элементы первичной цепи следующие. Коммутационный транзистор Q1 и с ШИМ (широтно импульсный модулятор) контроллер. Транзистор преобразует постоянное выпрямленное напряжение 310В в переменное. Оно преобразуется трансформатором Т1 на вторичной обмотке в пониженное выходное.
И еще — для питания ШИМ-регулятора используется выпрямленное напряжение, снятое с дополнительной обмотки трансформатора.
Работа вторичной цепи импульсного блока питания
Во выходной цепи после трансформатора стоит либо диодный мост, либо 1 диод и CLC фильтр. Он состоит из электролитических конденсаторов и дросселя.
Для стабилизации выходного напряжения используется оптическая обратная связь. Она позволяет развязать выходное и входное напряжение гальванически. В качестве исполнительных элементов обратной связи используется оптопара OC1 и интегральный стабилизатор TL431. Если выходное напряжение после выпрямления превышает напряжение стабилизатора TL431 включается фотодиод. Он включает фототранзистор, управляющий драйвером ШИМ. Регулятор TL431 снижает скважность импульсов или вообще останавливается. Пока напряжение не снизится до порогового.
Обновление PIP для Python в Windows
Время от времени выпускаются новые версии PIP. Эти версии могут улучшать функциональность или быть обязательными в целях безопасности.
Вы можете обновить PIP в Windows с помощью окна командной строки.
Чтобы обновить PIP в Windows, введите в командной строке следующее:
Эта команда сначала удаляет старую версию PIP, а затем устанавливает самую последнюю версию PIP.











